











Descrição
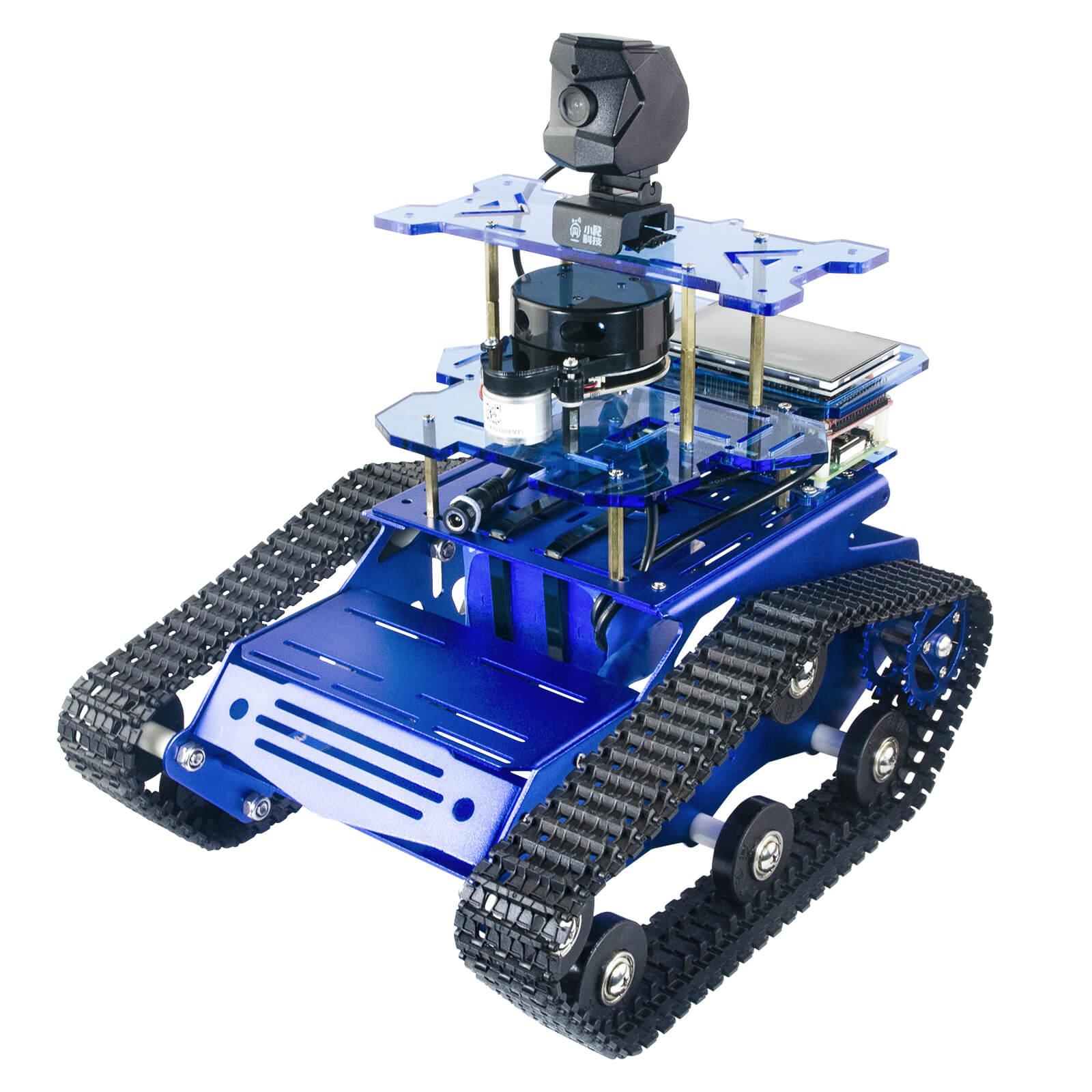
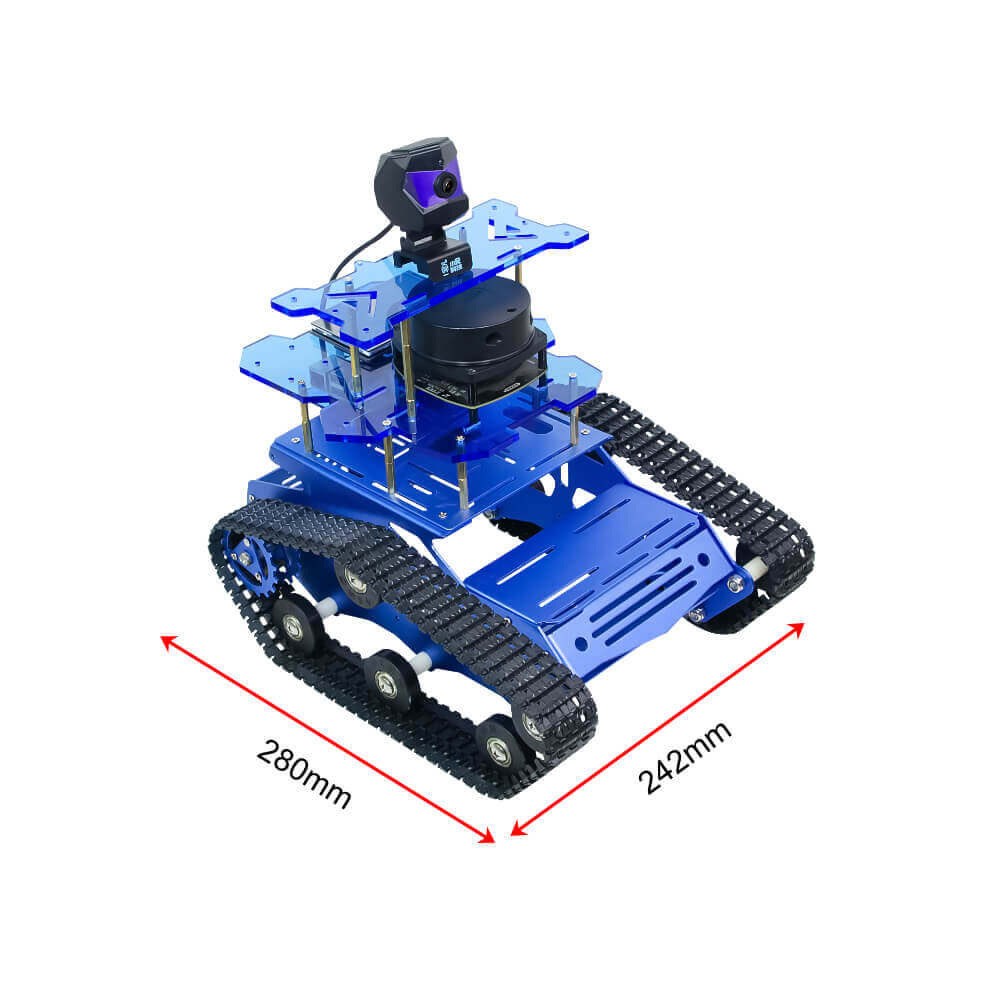
XR-ROS SLAM AI Robot Car Kit: Master Autonomous Navigation
Advanced ROS Robotics Made Easy: This kit includes Raspberry Pi 4B (4GB), XR-Lidar S1, HD Camera, and a 3.5" Touch Display for powerful AI navigation. Learn Python & C with comprehensive tutorials.
Key Features:
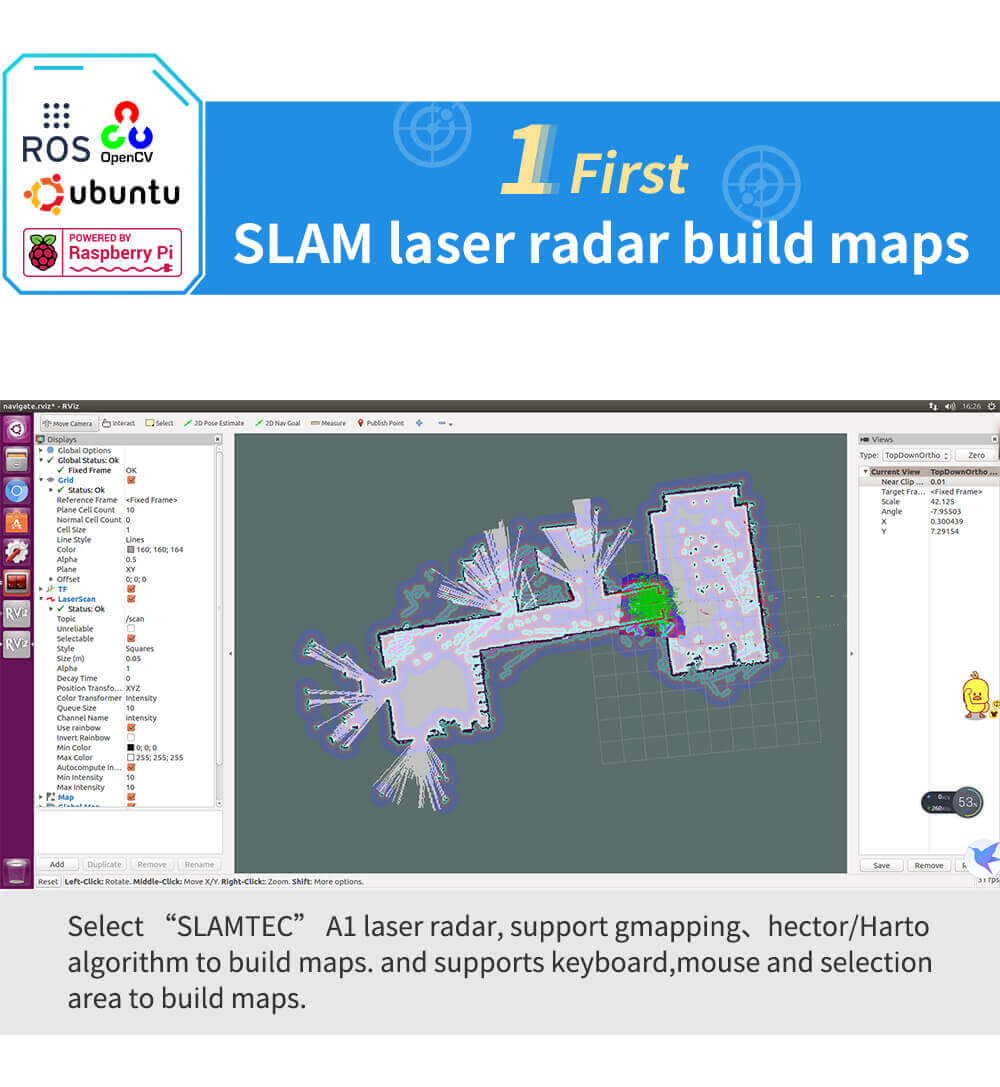
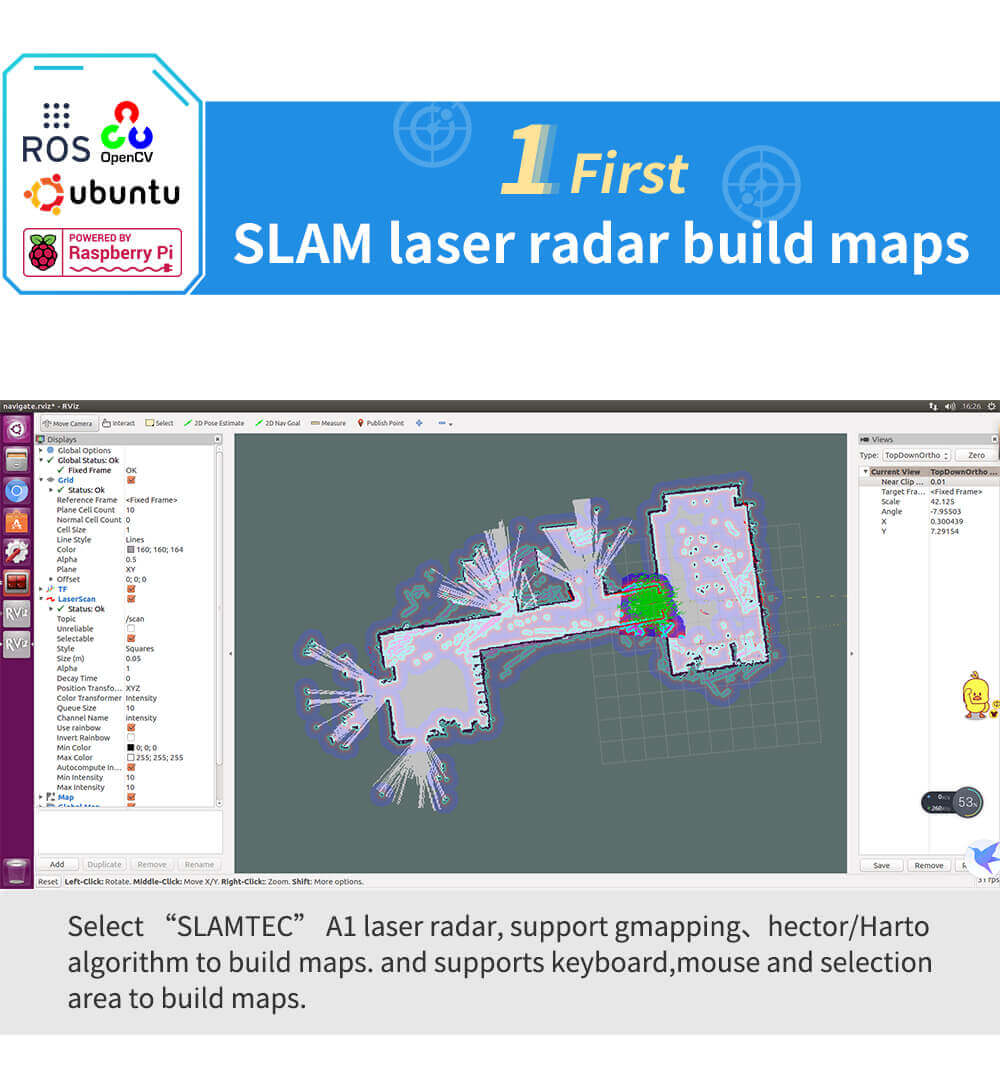
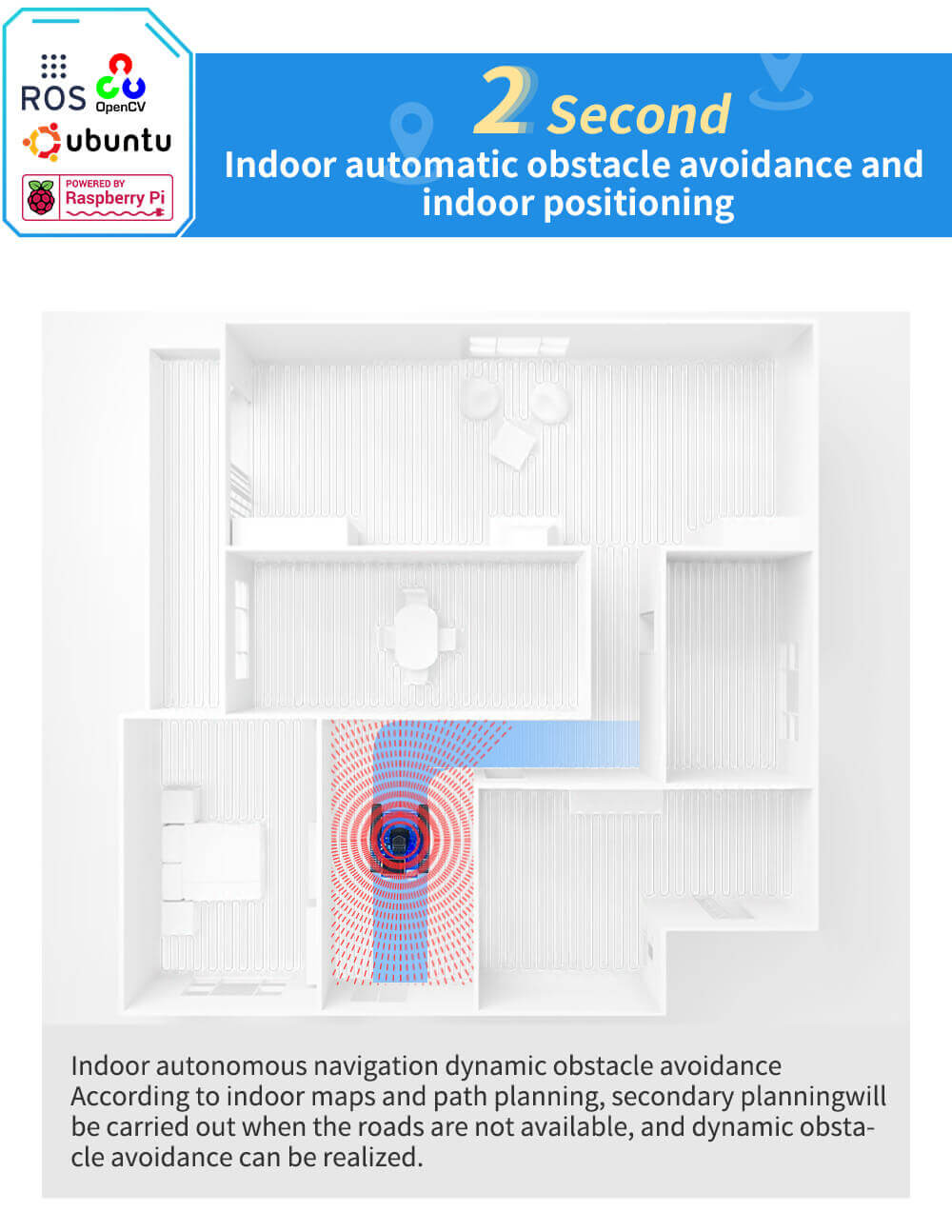
SLAM + LIDAR Mapping: XR-Lidar S1 provides precise scanning, ranging, and real-time map building for reliable autonomous navigation.
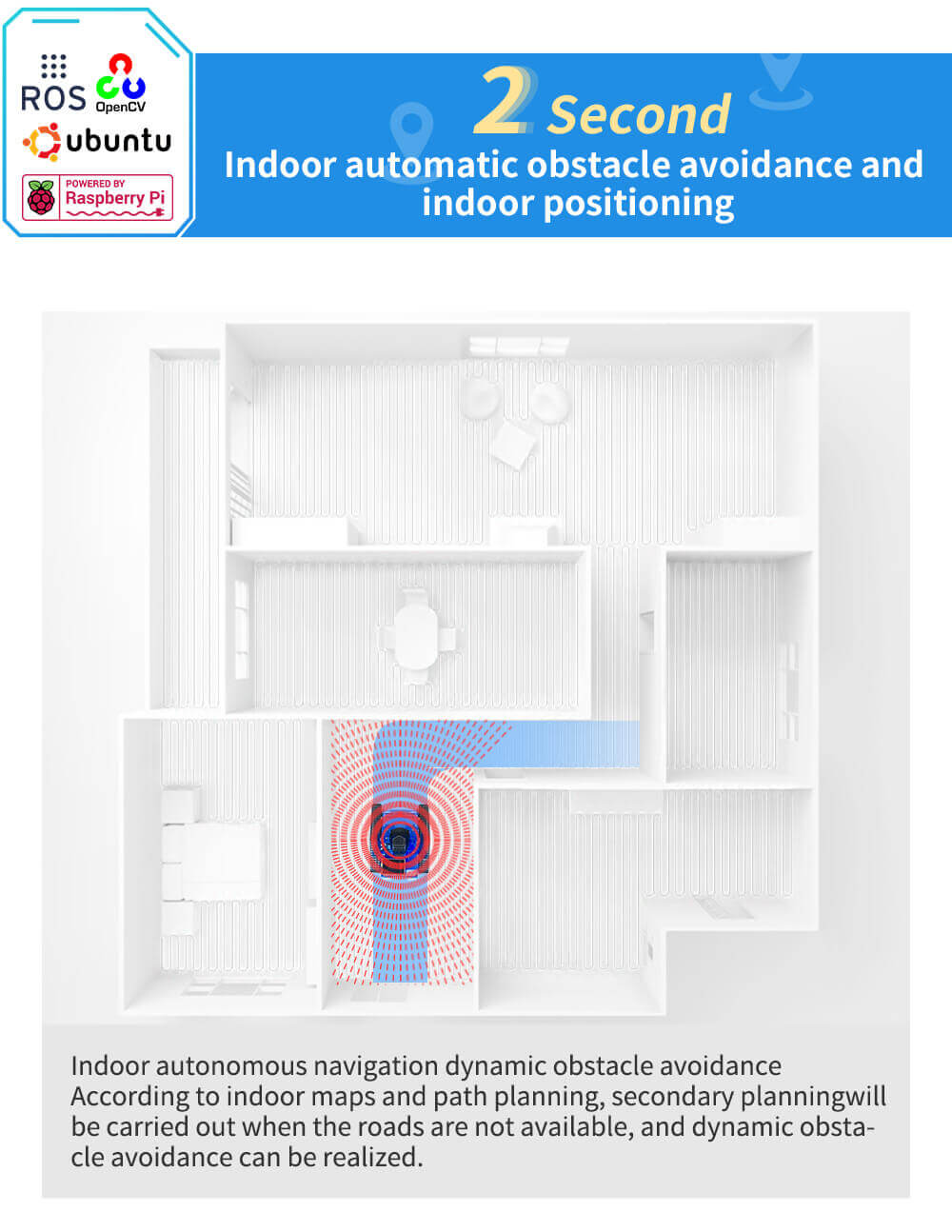
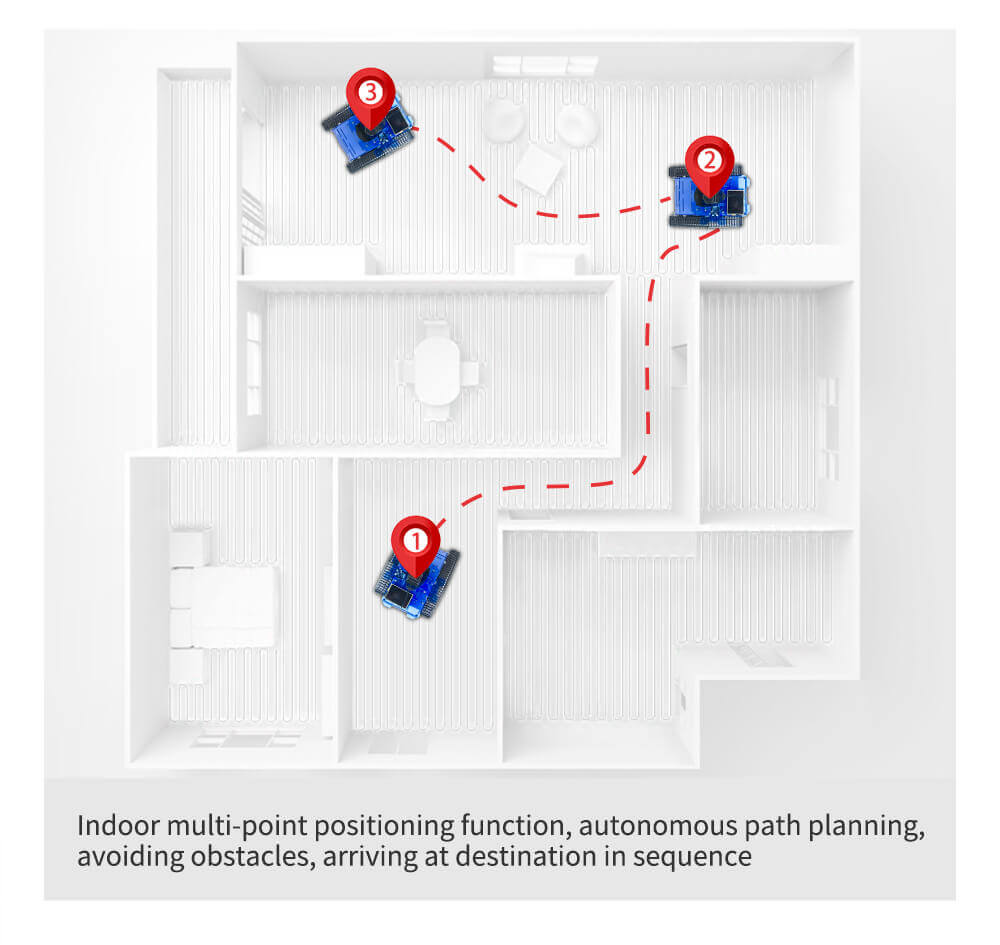
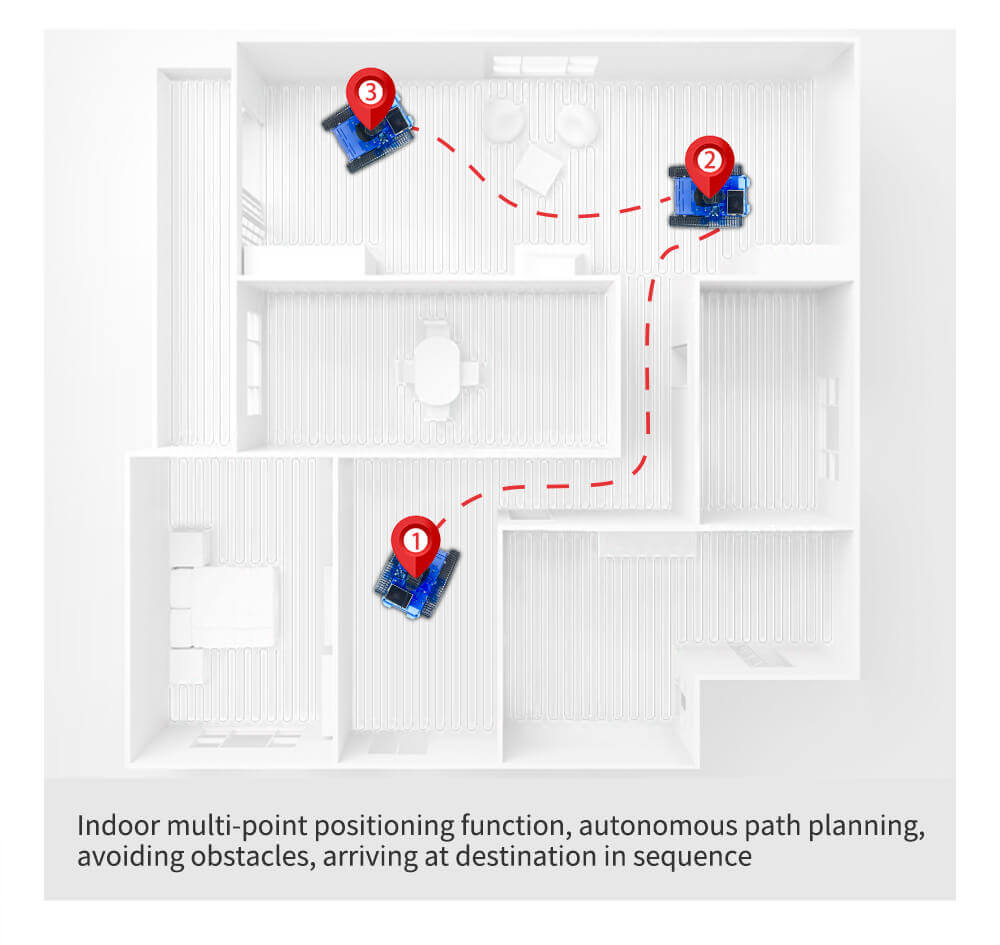
Autonomous Driving & Navigation: Obstacle avoidance, fixed-point and multi-point navigation, and automatic driving modes keep projects on track.
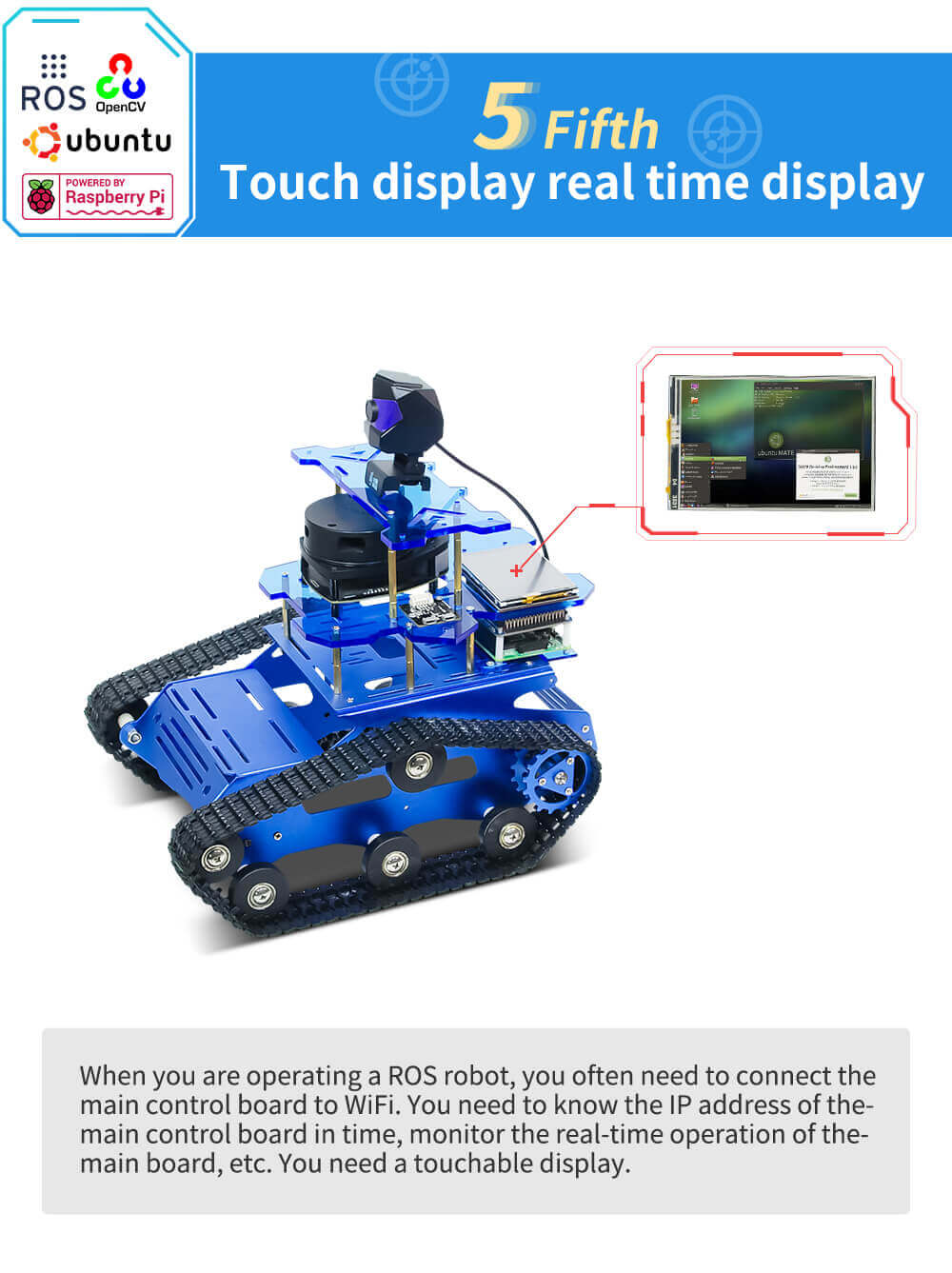
Human-Computer Interaction System: An exclusive Android app paired with a 3.5-inch touch display makes operation simple and beginner-friendly.
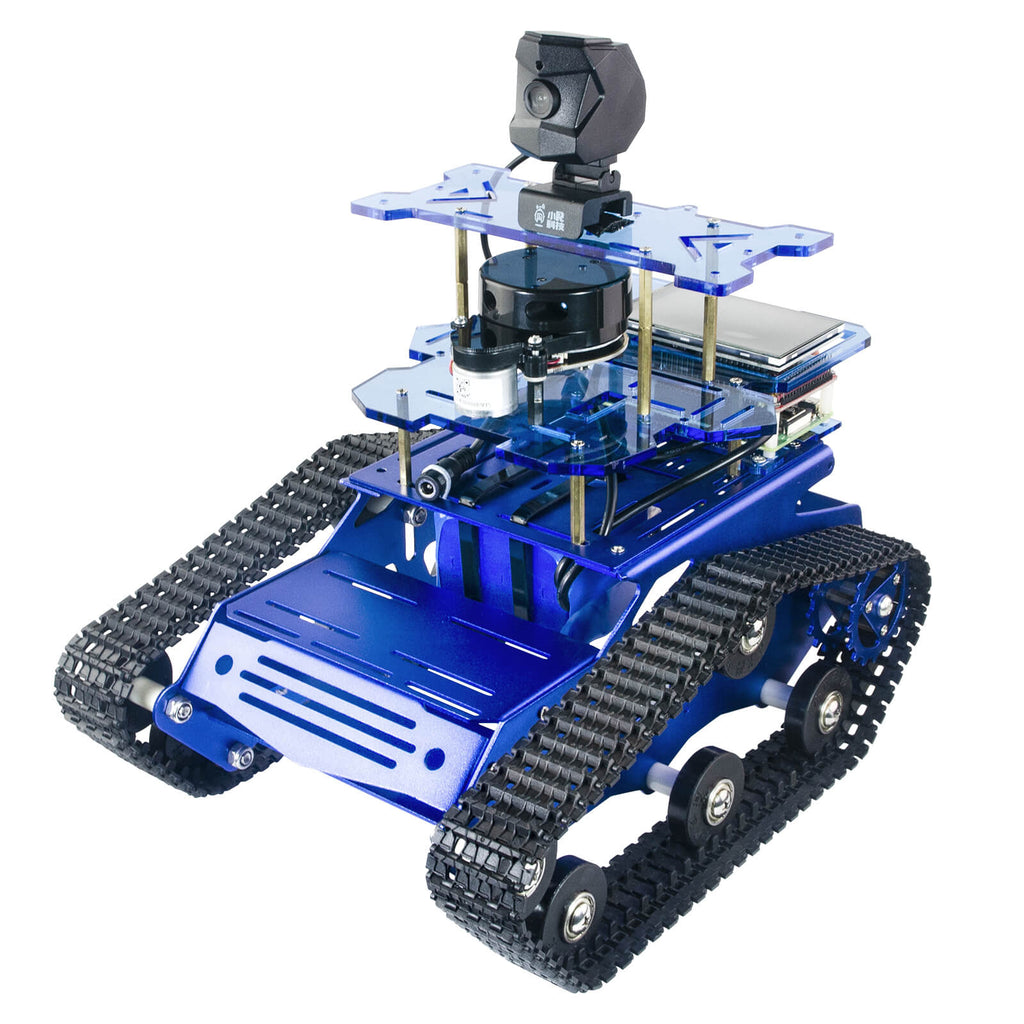
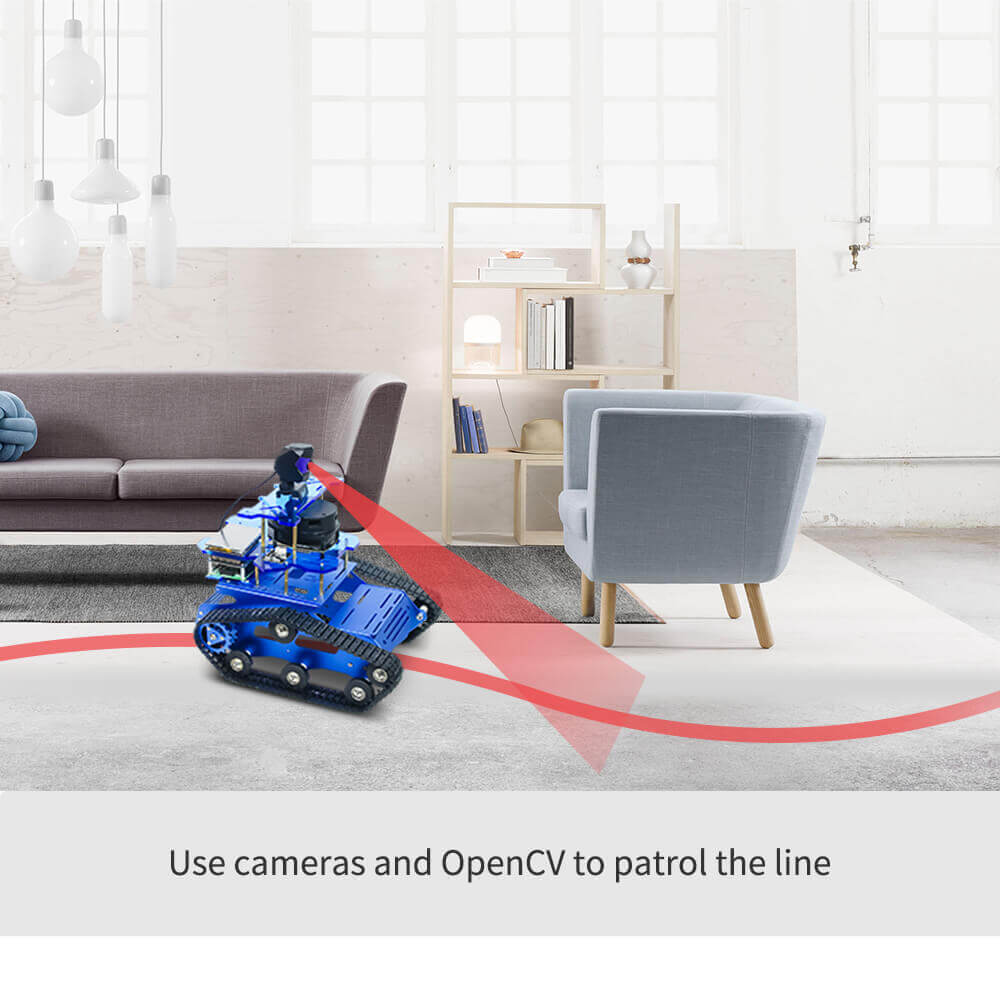
Camera & Display: High-definition camera plus a 3.5" touch screen for live viewing and on-device control.
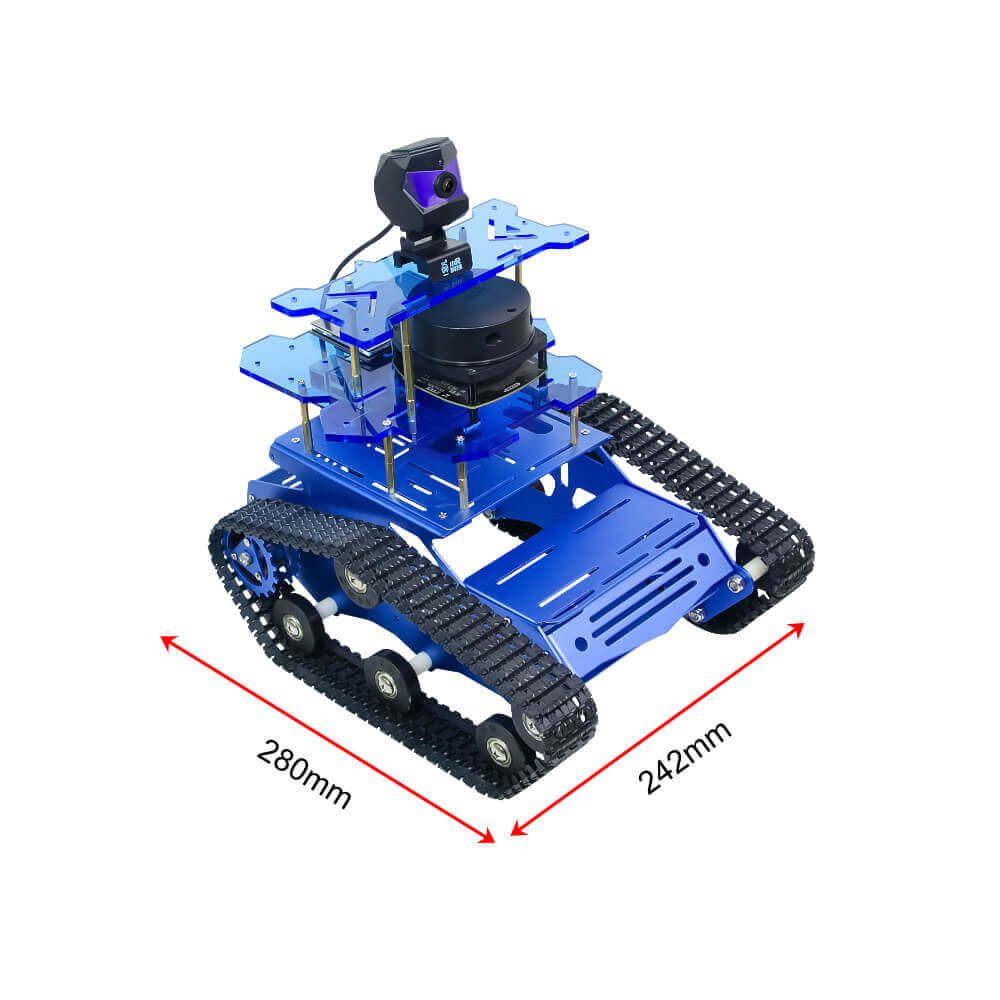
Robust Hardware: Large aluminum alloy chassis, powerful encoders, metal servos, and a professional robot expansion board ensure stable operation on diverse surfaces.
Easy Assembly: Clear video guides enable assembly in about an hour, making it ideal for education, DIY enthusiasts, and team projects.
Specification:
Mainboard: Raspberry 4B4G
Program language: Python, C language
Size: 280*242*300mm
Weight: about 3.5KG
Battery: 2200mAh lithium battery pack
Digital display voltage: Three-digit display voltage
Motor: DC brush motor
IMU: Nine-axis gyroscope sensor
NOTE:
1. Some countries can't ship batteries, we will send battery cases instead of batteries. You need to buy a battery like the link of this specification, 12V, more than 5A in your country.
2. Provide E-book with detailed installation tutorials and complete source code for secondary development. If you have any questions, contact us and you will have a professional technical team to guide you. (service@xiaorgeek.net)
3. The control software now only supports the Android system, the default language is English.

Shipping and delivery Information
Shipping Policy
Shipping time:Within 3 days after you pay for the order.
Start Date - All Time
End Date - All Time
Order weight less than 1000g - You have to pay shipping fee, $15 by default (small package Air).
Order weight more than 1000g and less than 2000g - You have to pay shipping fee, $25 by default.
Order weight more than 2001g and less than 3000g - You have to pay shipping fee, $35 by default .
Order weight more than 3001g and less than 4000g - You have to pay shipping fee, $45 by default .
Order weight more than 4001g and less than 5000g - You have to pay shipping fee, $55 by default.
Some of our products come with battery and motor. we will select suitable express to ship, such as: DHL, UPS, Fedex, or special line, depending on your country.
Distributors are not eligible for free shipping.
Shipping Method
|
Shipping Method |
Delivery Time(business day) |
Tracking No |
Weight Limit |
|
DHL |
5-7 |
YES |
No |
|
UPS |
5-7 |
YES |
No |
|
Fedex |
7-10 |
YES |
No |
|
Special line |
7-15 |
YES |
No |
|
Small Packets Air |
10-20 |
YES |
No |
After your package is sent out, you can see your tracking number on our website. We will also inform you via email about your tracking number and tracking link.
Customs, Duties and Taxes
Our term is EXW Shenzhen which doesn’t include custom fee. You should expect to pay any amount charged by the government in your respective country. This includes, and is not limited to, duties, taxes and any extra fees charged by the courier company.
About battery: Some countries can't ship batteries, we will send battery cases instead of batteries. You need to buy the battery like the link of this specification, 12V, more than 5A in your country.
Payment & Security
Payment

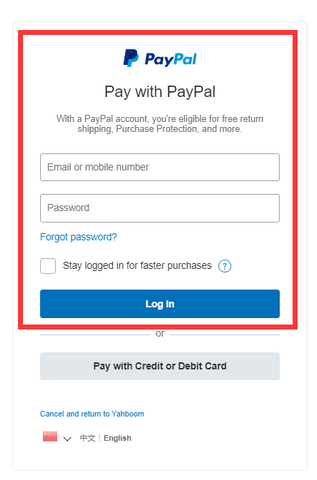
PayPal
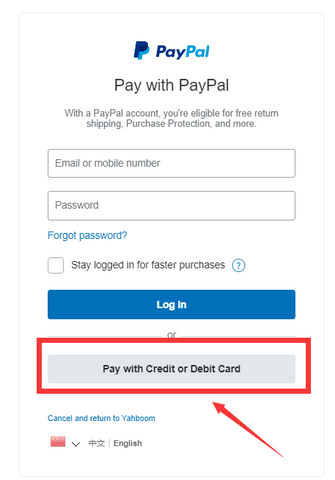
The main Payment method is Paypal. If you have paypal, that is great. You can simply place order and check out with few steps. If you don't have Paypal account, you can register it and pay by Credit or Debit Card.
Pay with Paypal
Pay with Credit or Debit Card
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Estimar frete