

The XR Hexapod J1 bionic intelligent programmable robot is developed based on the NVIDIA Jetson Nano platform. Through the inverse kinematics algorithm, it can vividly imitate the movement gait of hexapod creatures in nature, which is very interesting.

The XR Hexapod J1 robot realizes wireless remote control through the machine's built-in WiFi and uses an APP to control it. You can install the APP on your Android/iOS mobile phone or tablet device for control, or you can control it through a PS2 controller.

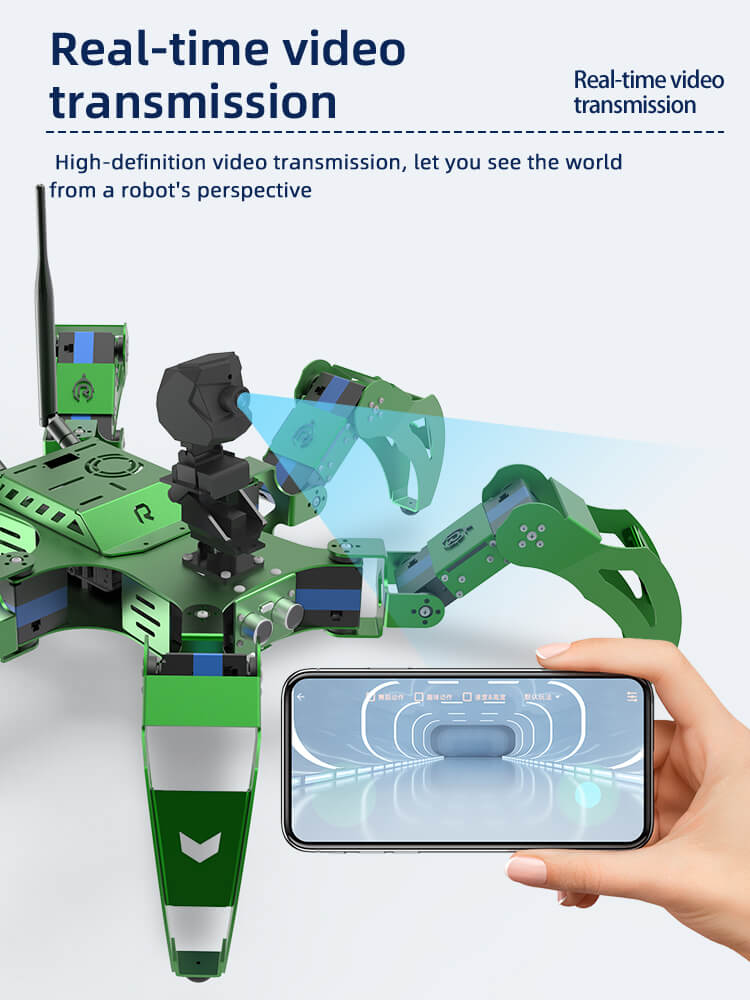
This product has a video image transmission function, which can transmit the video images collected by the robot's eyes (720p HD camera) to the control terminal for display in real time, allowing you to see the world from the robot's perspective.
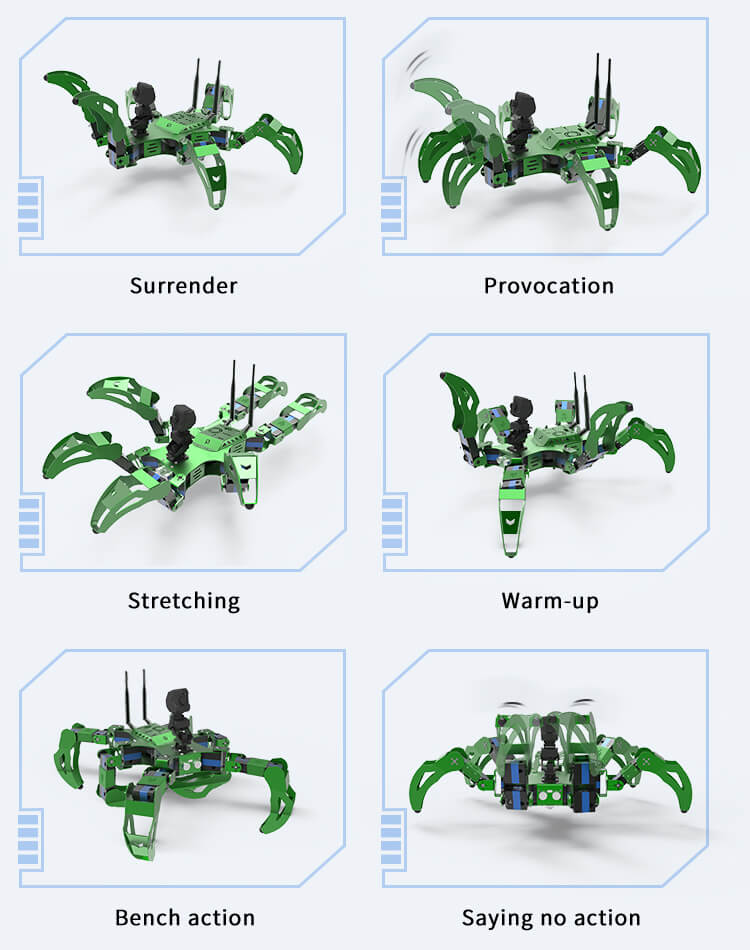
The XR Hexapod J1 robot can simulate 18 kinds of bionic gait actions such as forward, backward, left and right, rotation, translation, diagonal movement, dance, and climbing of six-legged creatures. It also has 12 interesting actions built-in, which is very It is suitable for science popularization museums, campus science and technology festival science display and performance activities, robot racing competitions, robot skills competitions and other events.

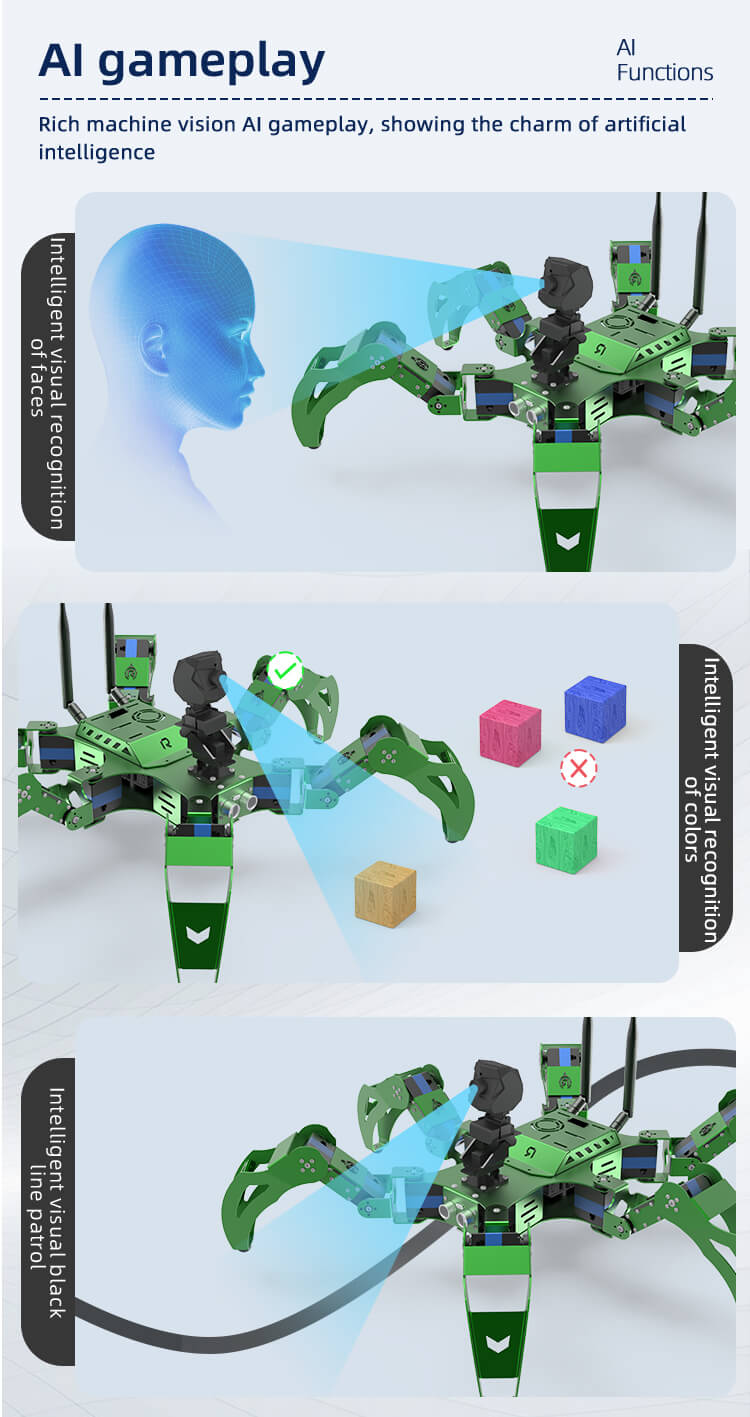
The XR Hexapod J1 robot also has AI machine vision functions, which can realize artificial intelligence features such as visual tracking, visual recognition of colors, visual recognition of faces, visual recognition of QR codes, etc.
This product also provides secondary development SDK code and an open API for users to call. Secondary development uses Python, a widely popular programming language in the maker community. You only need to simply learn the basic programming operations of Python and you can easily get started with the secondary movements of this robot. After this development, it can be used as an artificial intelligence laboratory training platform for majors in electronic information, artificial intelligence, Internet of Things, computers, automation, etc. in secondary and higher education institutions.

The attached courses will start with an introduction to basic robot parameters, and will guide you through the robot's motion control, secondary development environment construction, Python source code analysis, and robot kinematics/inverse kinematics knowledge. It is both educational and entertaining, allowing you to learn from playing. Learn valuable robotics knowledge in high school.
The product is programmed using Python language, and provides secondary development source code SDK and supporting course materials, making it easy to get started with practical training and development.
Key technologies: Python/hexapod bionics/kinematics algorithm/inverse kinematics algorithm/Jetson Nano
| Parameter name | Parameter details |
| Size | 300X300X250 mm (standby standing position) |
| Weight | 3.2kg |
| Main control | Jetson Nano Quad-core ARM A57@1.43 GHz. |
| DDR | 4GB |
| Interface | 1 x1/2/4 PCIE, 1x USB 3.0, 3xUSB 2.0 |
| Main control system | Ubuntu |
| Power supply voltage | DC 8V |
| Working current | 9A |
| Maximum speed | 25cm/s |
| Battery capacity | 4000mAh |
| Battery life | 1 H |
| Servo model | XR-S270 |
| Degree of freedom | 18 DOF + 2 DOF gimbal |
| Charging time | 7-10 hours |
| Gait type | Delta gait |
| Gait algorithm | Inverse kinematics solution |
| Camera resolution | 720P |
| Camera pixel | 1 million |
| Control distance | 20M |
| Control method WiFi wireless | 802.11b/g/n |
| Control terminal | Mobile phone, PAD, PC computer |
| Programming language | Python,C++ |
| Core driver board parameters | ||||||||||||||||||
|