
Nachricht

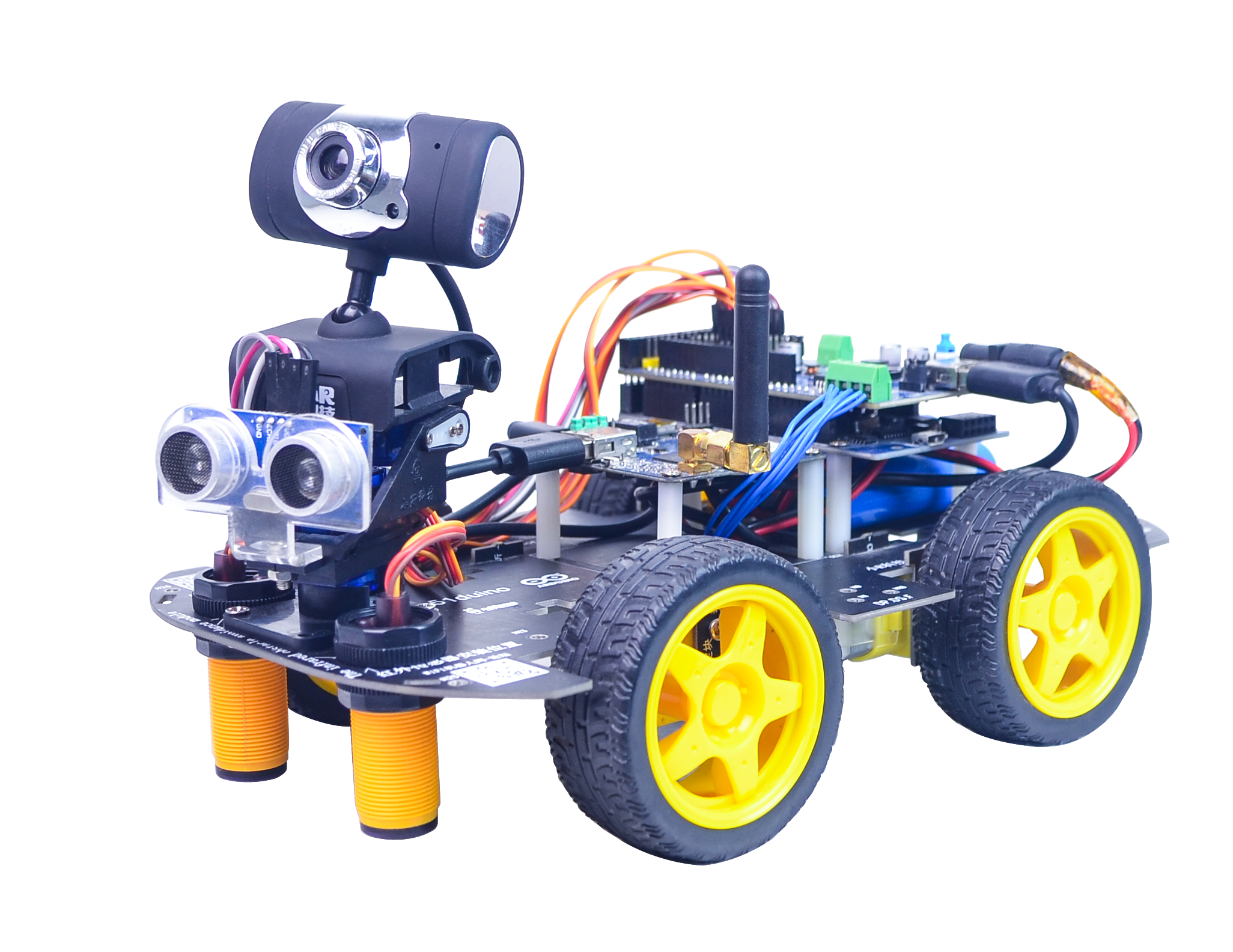
MINI Tank Intelligentes Roboterauto
Stellen Sie das intelligente Roboterauto MINI vor, das mit Arduino oder Raspberry Pi gesteuert werden kann.

Übersicht über das Radarroboterauto Jetson Nano Ros mit 7-Zoll-Touchscreen
Jetson Nano Ros Slam Radar-Roboterauto mit 7-Zoll-Touchscreen-Einführung.
Raspberry Pi ROS Robot – Grundbedienungsanleitung V1.0
Vermittlung der grundlegenden Bedienungsanleitung zur Bedienung des intelligenten Roboterautos Raspberry Pi ROS.

Übersicht über das Ros-Radarroboterauto mit RPi
Überblick über die Parameter und Funktionen des ROS-Radar-Rasberry-Pi-Roboterautos.

Lösungsmethode des ROS-Roboterautos
Lösung: Das Problem des weißen Bildschirms tritt auf, wenn eine virtuelle Maschine zur Steuerung eines ROS-Roboterautos verwendet wird.
Codeanalyse des Roboterautos für den Fluchtmodus der Patrouillenlinie
Analyse des Linienpatrouillen- und Fluchtmoduscodes des Programms durch das Roboterauto
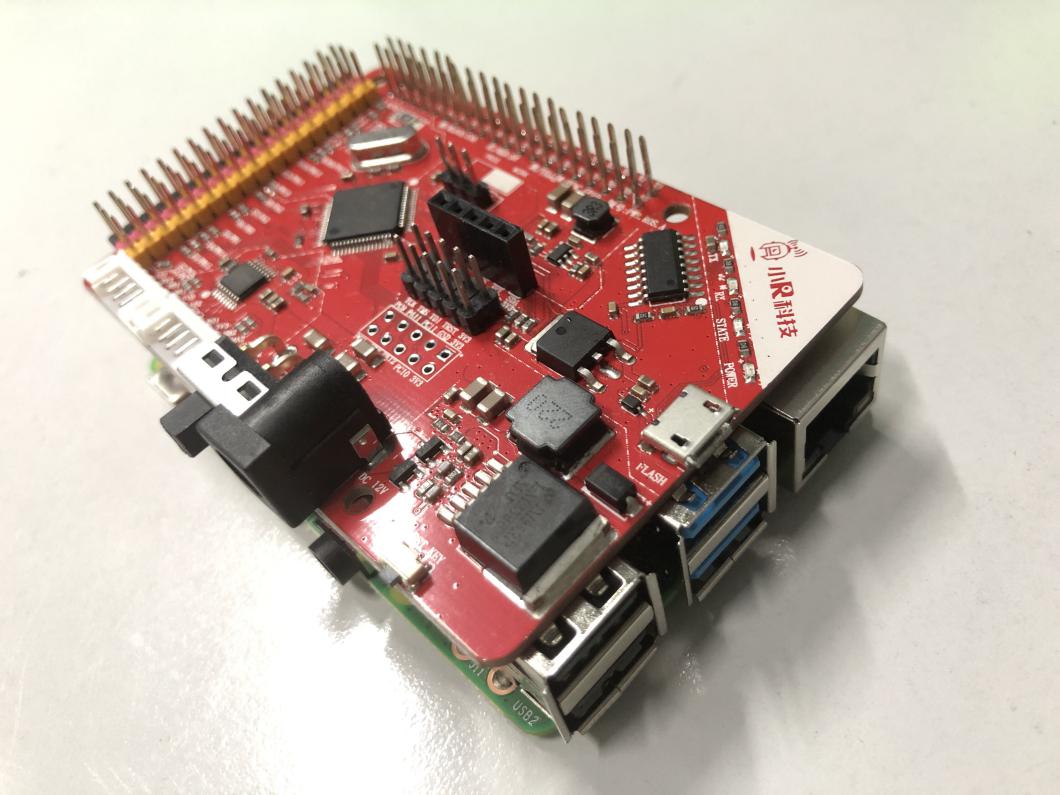
WIFI/Bluetooth Smart Car Robot Treiberplatine
Beschreibung der WIFI/Bluetooth Smart Car Robot Treiberplatine
Die Anweisungen der Roboterauto-Steuerungsplattform-API
Die Anweisungen des API-Aufrufs der WIFI/Bluetooth-Smart-Car-Roboter-Steuerungsplattform
Der Quellcode des Roboterautos
Die Quellcodestruktur des Studio-Treiberboards zum Roboterauto und wie man die vom Studio veröffentlichten neuen Funktionen zusammenführt und ihre eigenen Funktionen erweitert.
Wie wir unser Roboterauto mit dem Internet verbinden und global steuern können. (mit Bild)
Wir wussten, wie man einen intelligenten Autoroboter mit WIFI herstellt. In diesem Tutorial erfahren Sie daher speziell, wie Sie unseren Roboter mit dem Internet verbinden und ihn dann auf globaler Ebene steuern können.
Nehmen Sie sich mit in das WIFI-Roboterauto – um die Grundprinzipien zu verstehen
Nehmen Sie sich mit in das WIFI-Roboterauto – um die Grundprinzipien zu verstehen
Ein WLAN-Roboterauto ist der Kindheitstraum vieler Menschen. M...