
Beschreibung der WIFI/Bluetooth Smart Car Robot Treiberplatine
Das Foto der Treiberplatine:
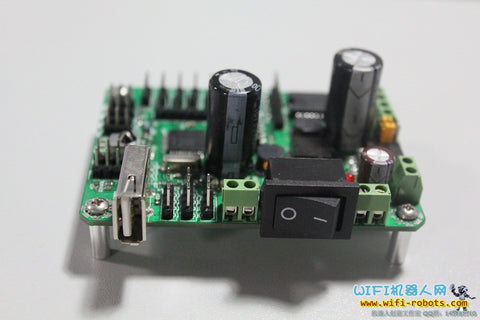

Im Vergleich zu einem Füllfederhalter sehr klein: 
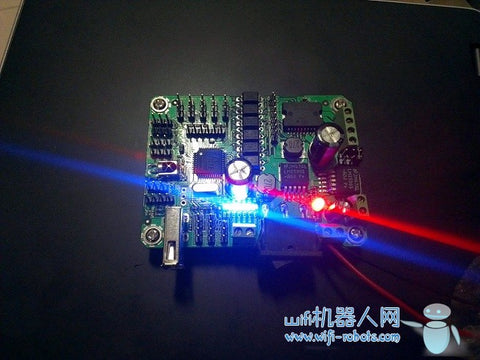
Foto vom Betrieb mit 12-V-Lithiumbatterie:
(Grüne Version)

(Blaue Version)
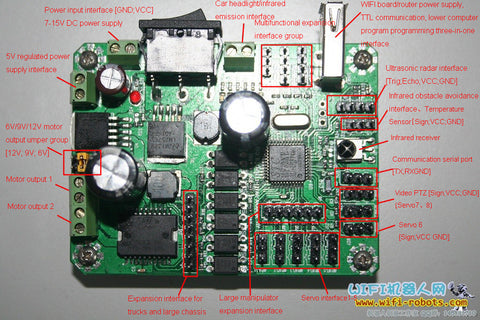
Schnittstellenbeschreibungsdiagramm:
Eigenschaften der Hardware-Ressource der Treiberplatine:
- MCU-Prozessor
--STC11F32XE, 32K Flash, 1280 Byte SRAM, integrierter Quarzoszillator 22,1184 MHz, im Vergleich zu herkömmlichen 51-Einzelchip-Mikrocomputern weist es die folgenden Eigenschaften auf:
1) Geringer Stromverbrauch, starke Entstörung und Superverschlüsselung;
2) Unterstützt den 1T-Modus. Die Hauptfrequenz von 22,1184 MHz entspricht ungefähr 265 MHz eines herkömmlichen Einzelchip-Mikrocomputers.
3) Unterstützt die IAP-Technologie. 29 KB EEPROM-Speicherplatz können zum Speichern von Benutzerdaten verwendet werden.
4) Es verfügt über einen unabhängigen Baudratengenerator.
- Motorantriebschip
--L298, integrierte Dual-Vollbrücken-Antriebsschaltung, kann 2 Gleichstrommotoren antreiben, kann auch zweiphasige Schrittmotoren antreiben, Standard 2A Antriebsstrom, neues importiertes SMT-Paket, Leistung ist viel besser als das inländische Plug-in-Paket L298, Der Preis ist auch viel teurer.
Inländisches Steckerpaket L298
- Duale Spannungsregelung der Stromversorgung
Diese Treiberplatine ist mit einem Zweikanal-Spannungsstabilisierungssystem ausgestattet, das den 7-16-V-Gleichstromeingang auf 5 V und andere Spannungen zur Verwendung durch die externen Geräte des Roboters stabilisieren kann. Im Vergleich zu anderen Treiberplatinen und Arduino-Treiberplatinen sind diese Treiberplatinen nicht stabil. Beim Drucksystem muss der Benutzer den Druckeingang selbst senken, was sehr mühsam ist.
--2 Stück LM2596, jeweils mit Unterstützung von 3 A Stromausgang, brandneue importierte Chips, geringe Hitze, Leistung und Preis sind viel höher als inländische Chips
- Schnittstellenressourcen und -eigenschaften
1) 1 Motorausgangsschnittstelle, Standardkonfiguration zum Antrieb von 2 Gleichstrommotoren (4 Kanäle von Schwachstrommotoren können auch parallel betrieben werden) und optionale Schrittmotoren
2) 1 Motorerweiterungslogik-Steuerschnittstelle, die zur Steuerung eines externen Hochleistungsmotorchassis (z. B. eines Big-Foot-Motors) verwendet wird;
3) 5 Lenkgetriebe-Antriebsschnittstellen (erweiterbar auf 8 Kanäle);
4) 1 erweiterte Logiksteuerungsschnittstellengruppe für Servos, die zur Steuerung des externen Super-Power-Servos verwendet wird;
5) 3 Infrarotschnittstellen zur Hindernisvermeidung;
6) 1 serieller TTL-Pin-Header-Anschluss;
7) Ein integrierter Infrarotempfänger;
8) 4 reservierte Schnittstellen, die an Temperatursensor, Ultraschallmodul, FM-Modul mit I2C-Schnittstelle usw. angeschlossen werden können;
9) 1 USB-Schnittstelle, perfekt angepasst an WLAN-Router wie 703, integriert 5-V-Stromversorgung und seriellen TTL-Anschluss und kann auch an ein externes serielles Anschlussmodul wie ein Fingerabdruckmodul usw. angeschlossen werden;
10) 1 Antriebsschnittstelle mit einem maximalen Ausgang von 500 mA, die an Infrarotsender, Summer, starke Leuchtdiode, Relais usw. angeschlossen werden kann;
11) 1 Netzschalter, 8A Arbeitsstrom, super Zuverlässigkeit;
12) 1 Gleichstrom-Eingangsschnittstelle, 7–15 V Bereichseingang;
13) 1 5-V-Spannungsausgangsschnittstelle, Standardstrom 1 A;
14) Jumper-Schalter zur Auswahl der Motorantriebsspannung, optionaler 6V/9V/12V-Ausgang.
15) 6 Gruppen heller LED-Laufanzeigen.
16) Die wichtigsten Logikteile sind durch Optokoppler isoliert, was die Stabilität erheblich verbessert.
17) Sie können das STC-ISP-Downloadprogramm zur Online-Programmierung verwenden.
Besonderer Hinweis: Auf der Rückseite der Treiberplatine befinden sich Pins mit der Bezeichnung VCC GND PWM. Bitte achten Sie darauf, die Verkabelung zu erkennen und anzuschließen. Darüber hinaus müssen der Spannungseingang, der TTL-Pegel und andere Parameter entsprechend dem Treiberplatinensymbol gekennzeichnet werden.