














Description
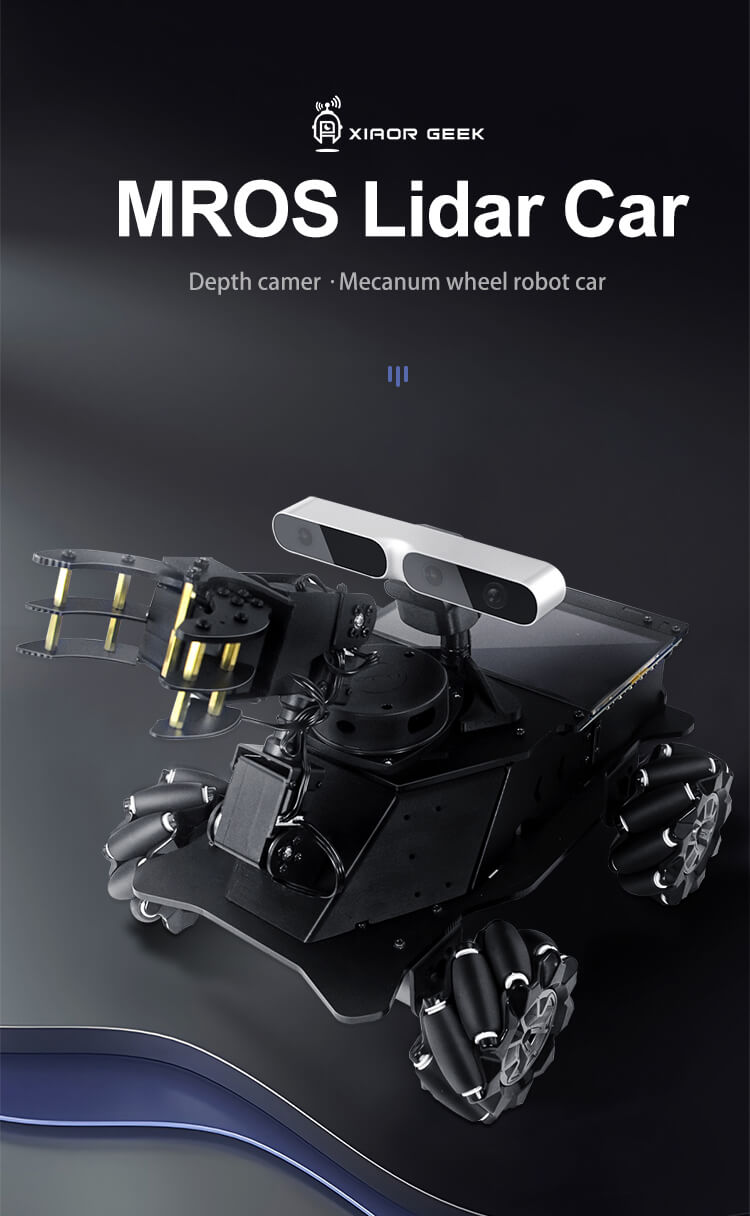
XiaoR GEEK ROS Lidar Depth camera Mecanum Wheel Programmable Smart Robot car with Moveit Robot Arm for Jetson nano
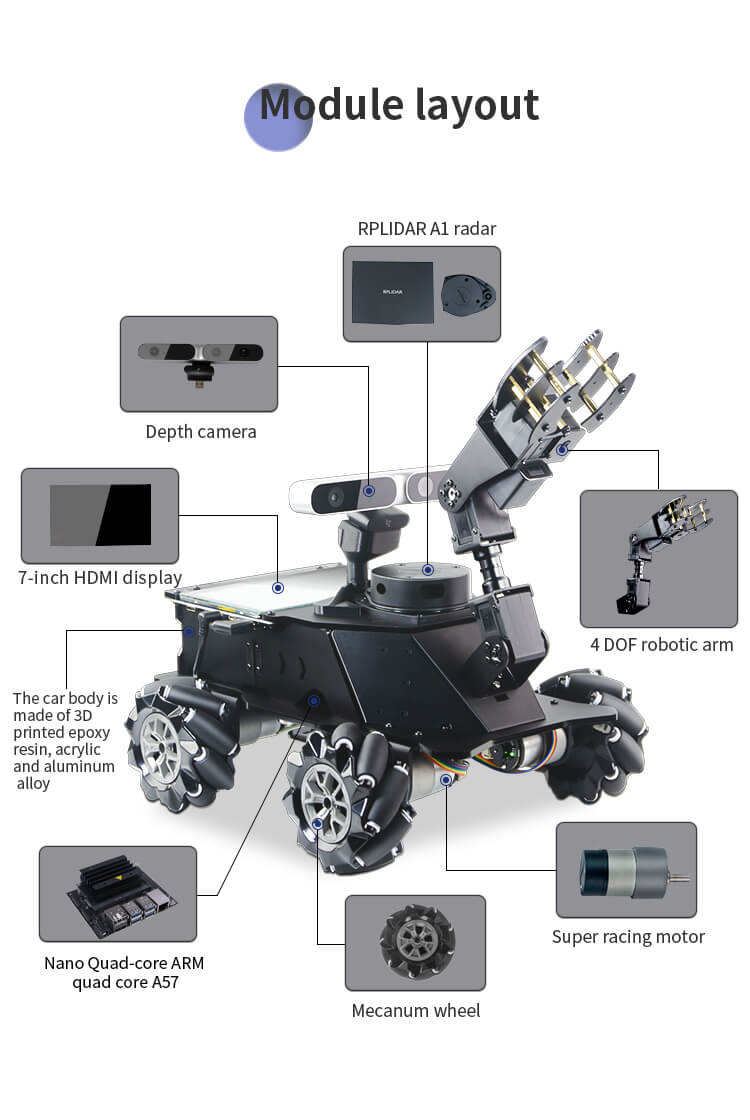
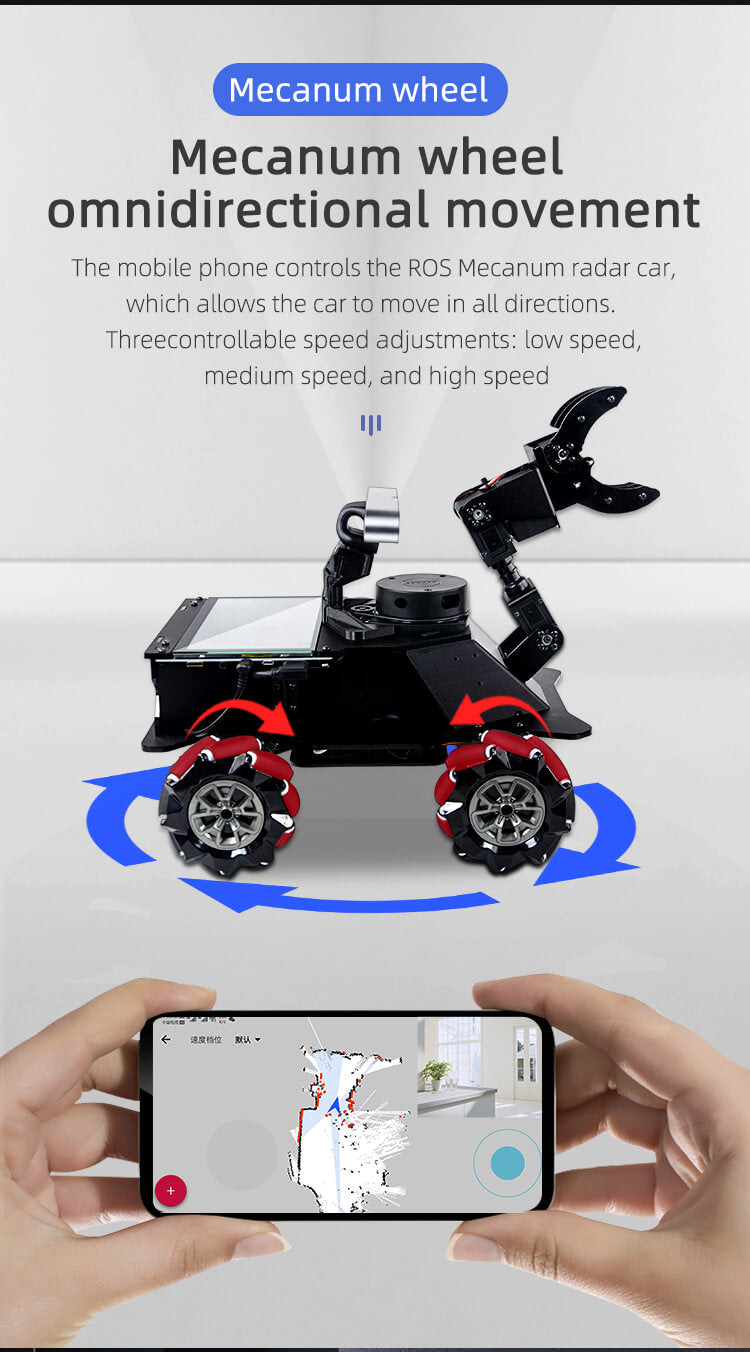
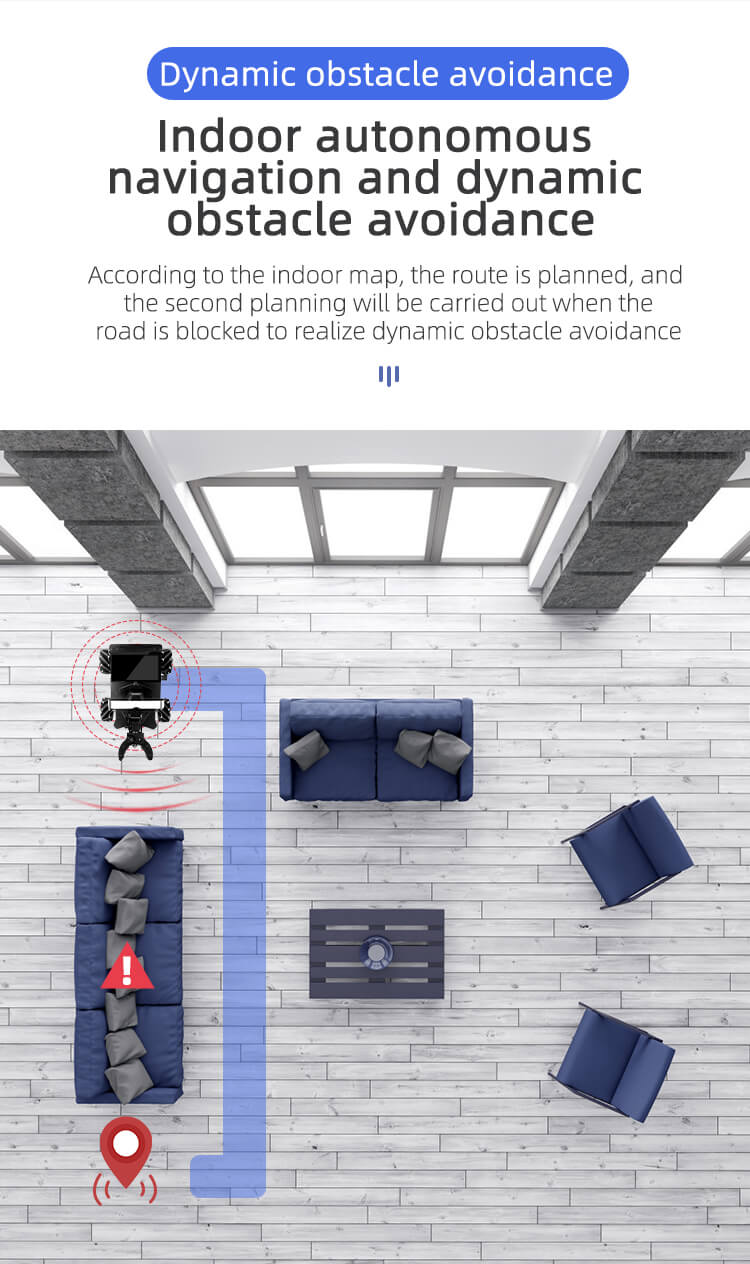
XR-MROS-NANO-A3 lidar autonomous navigation mecanum wheel robot car with robotic arm is a lidar robot car developed based on the Jetson Nano main control board. This car uses mecanum wheels as the traveling mechanism and can move laterally and laterally; Through RPLADAR A1 lidar mapping and navigation, real-time mapping fixed-point navigation and multi-point positioning, autonomous path planning, dynamic obstacle avoidance, Opencv visual line inspection and other functions can be realized.
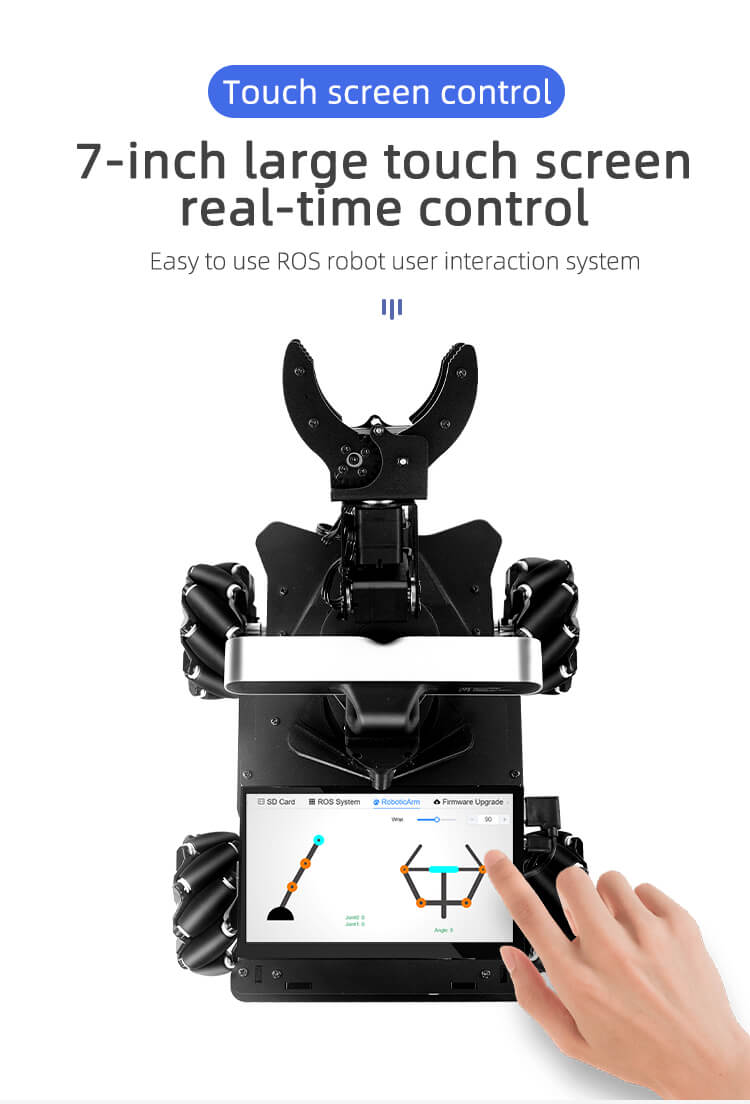
The robot supports control terminals such as mobile phone APP, virtual machine RVIZ, PS4 Bluetooth controller, etc., and can enter the map-navigation mode conveniently and quickly;
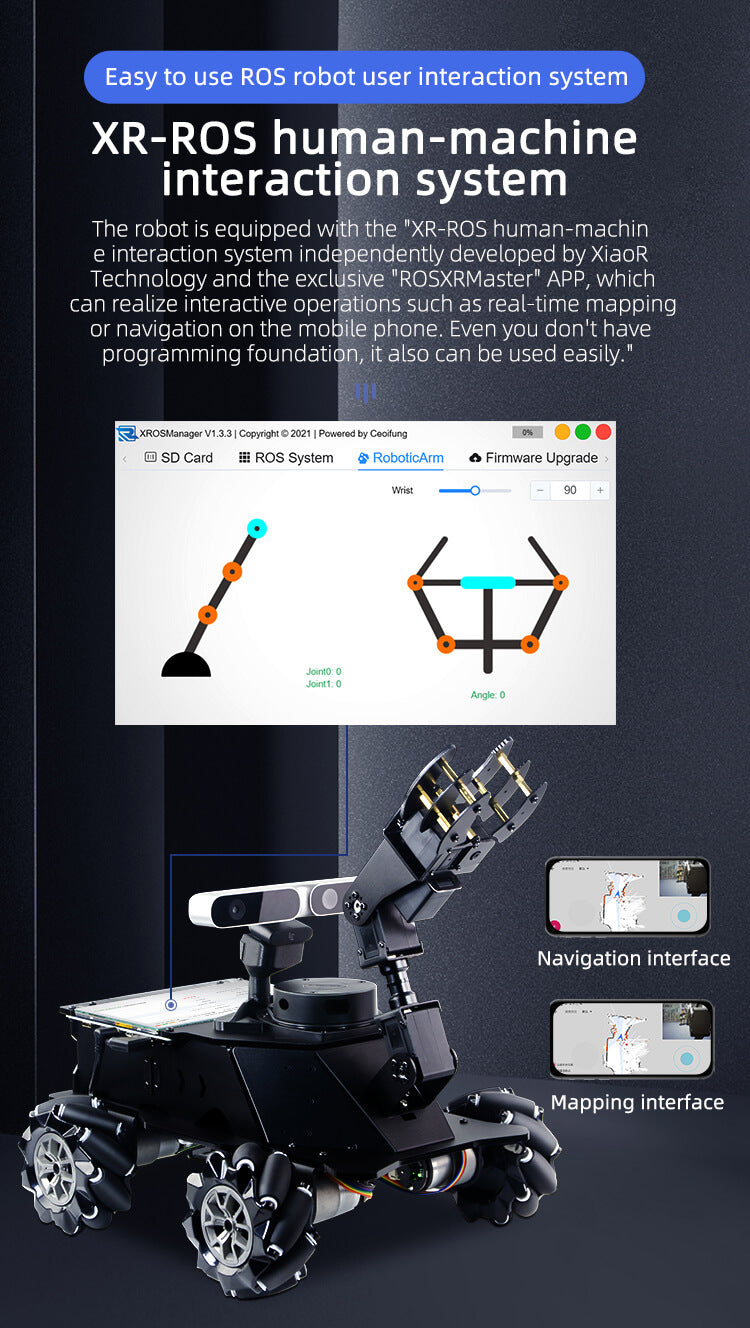
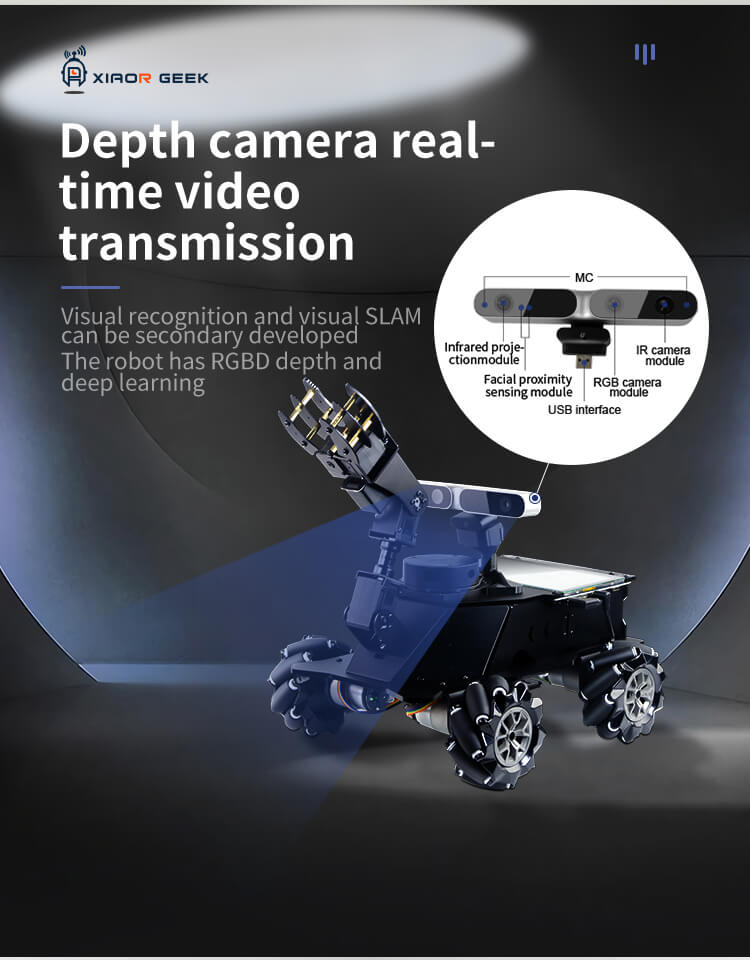
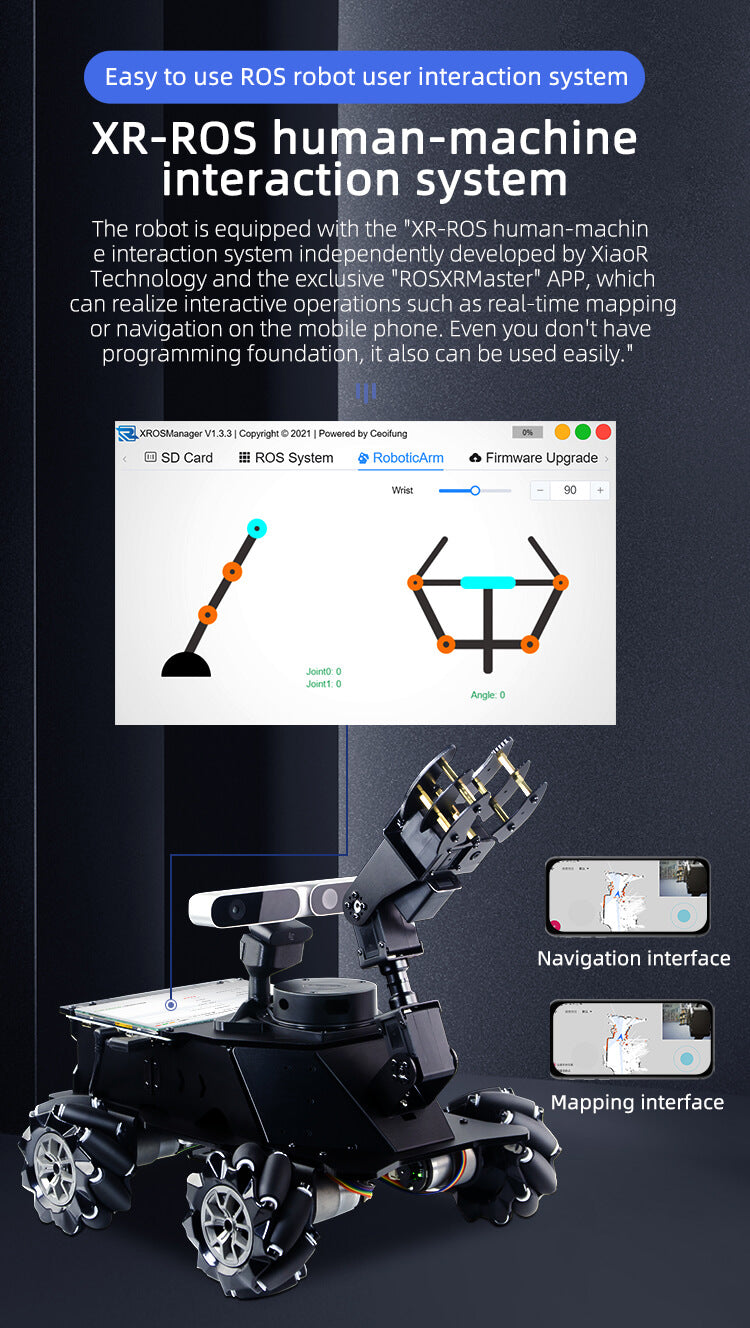
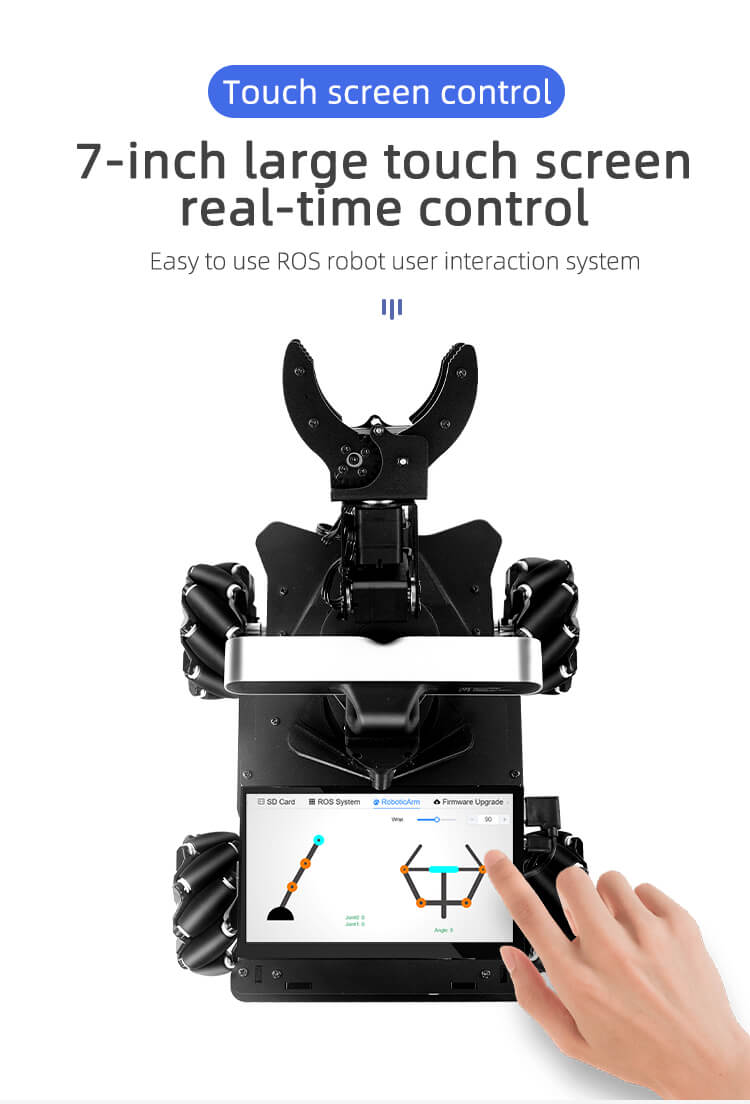
The robot is equipped with the "XR-ROS Human-Computer Interaction System" independently developed by XiaoR Technology and the exclusive APP of "Little R Technology Ros-SLAM Robot", which can realize interactive operations such as real-time mapping or navigation on the mobile phone. Realize automatic path planning and navigation, and automatically avoid obstacles encountered during travel.
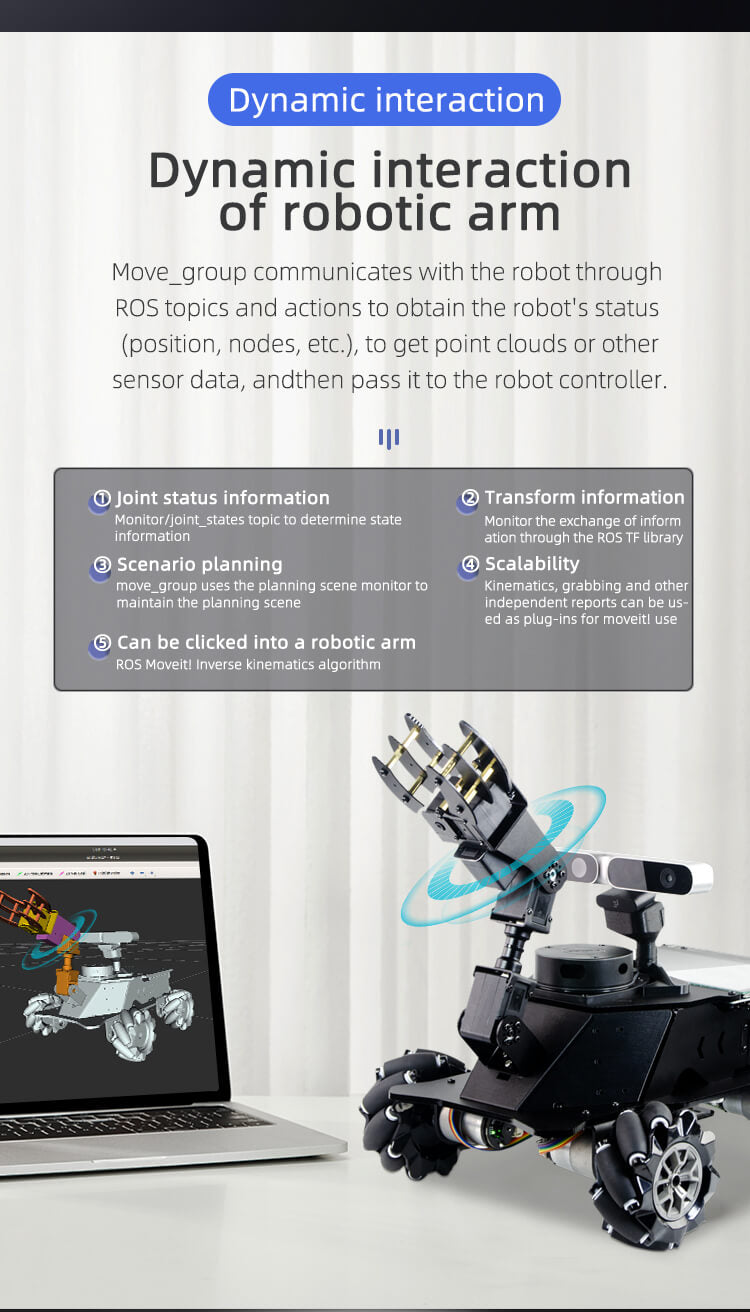
The robot is equipped with XR-A3 high-precision and high-torque robotic arm, which can realize the Moveit plug-in to plan the path motion of the robotic arm. The maximum grabbing weight of the robotic arm is 500g.
Key technologies: Python/ROS/SLAM autonomous navigation/Moveit robotic arm.
Product Features
Mecanum wheel travel mode:The car adopts the mecanum wheel traveling method, which can be translated horizontally, can move in the shape of a meter, can rotate 360, runs stably, and has strong passability.
Arm function:6-DOF robotic arm, 180-degree free rotation, unique APP control interface, synchronous control of the virtual robotic arm, control the grasping movement of the robotic arm as you like, equipped with Moveit! The robot arm plug-in can realize the robot arm motion path planning.
WIFI wireless remote control:After the car is turned on, it generates a WiFi signal, and the mobile phone or tablet can connect to the car through WiFi, and control it with a dedicated APP.
2.4G wireless handle remote control:The car is compatible with 2.4G wireless handle real-time remote control, supports the handle to control the movement of the mechanical arm, and the control link is stable;
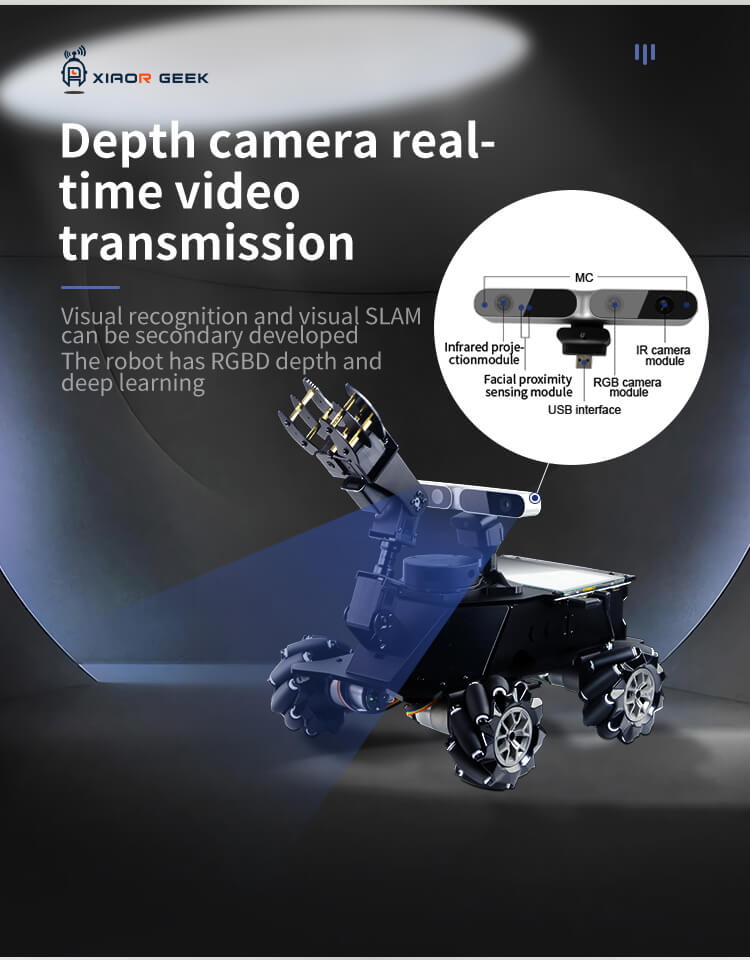
Real-time video transmission: Through WiFi, real-time transmission of video images captured by the camera of the car to the APP or computer control software interface to achieve first-person visual effects.
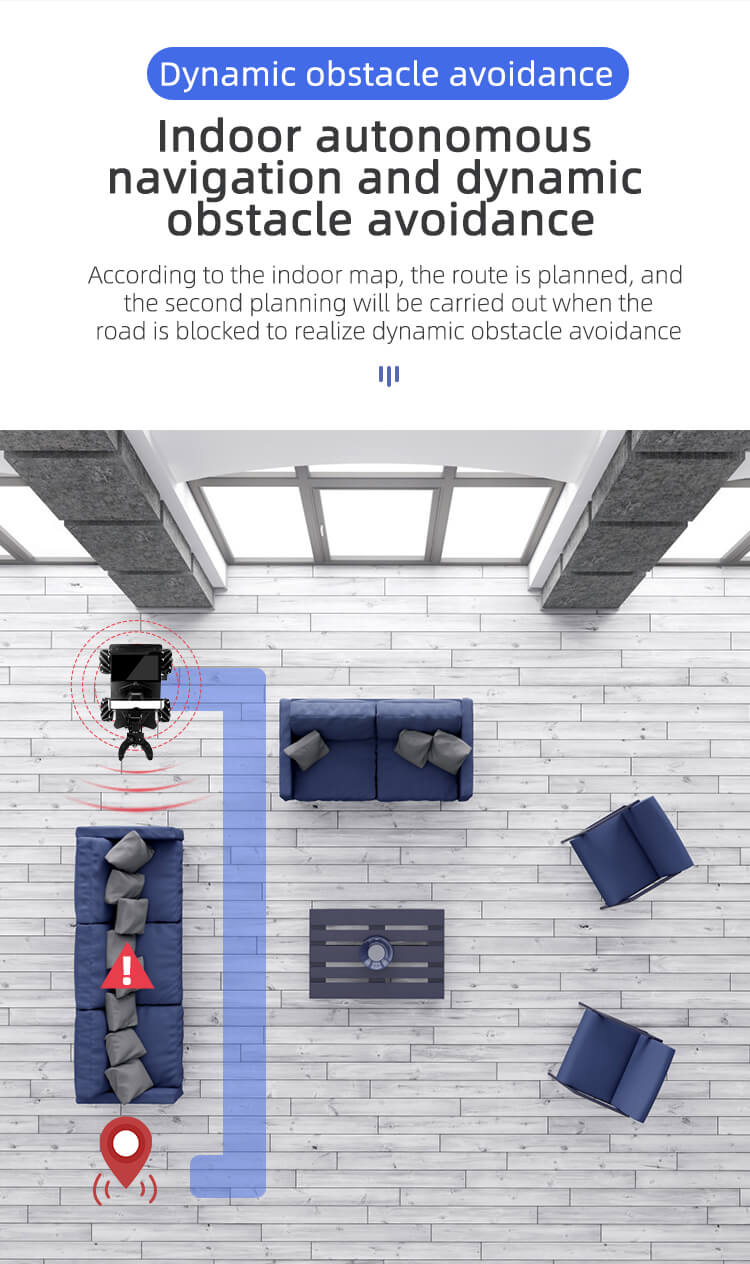
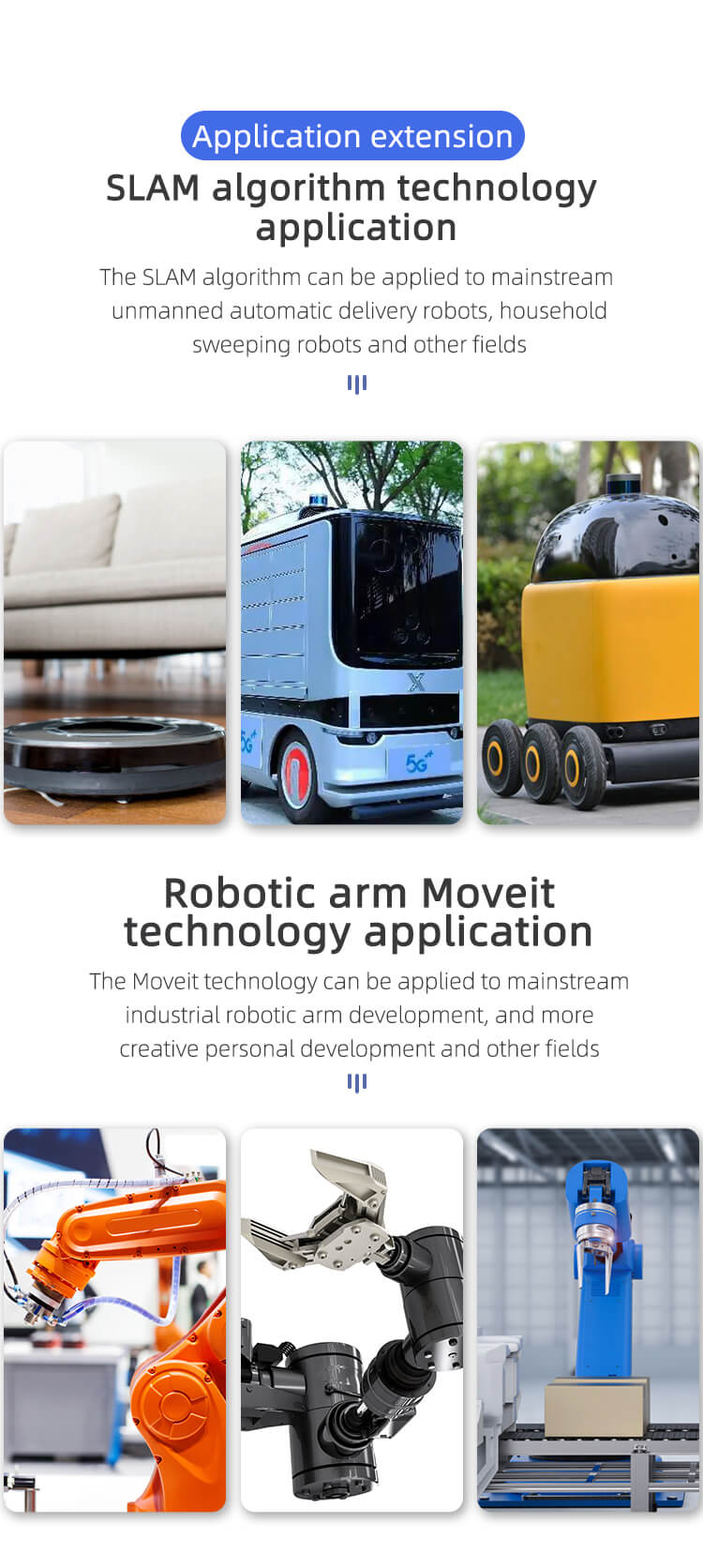
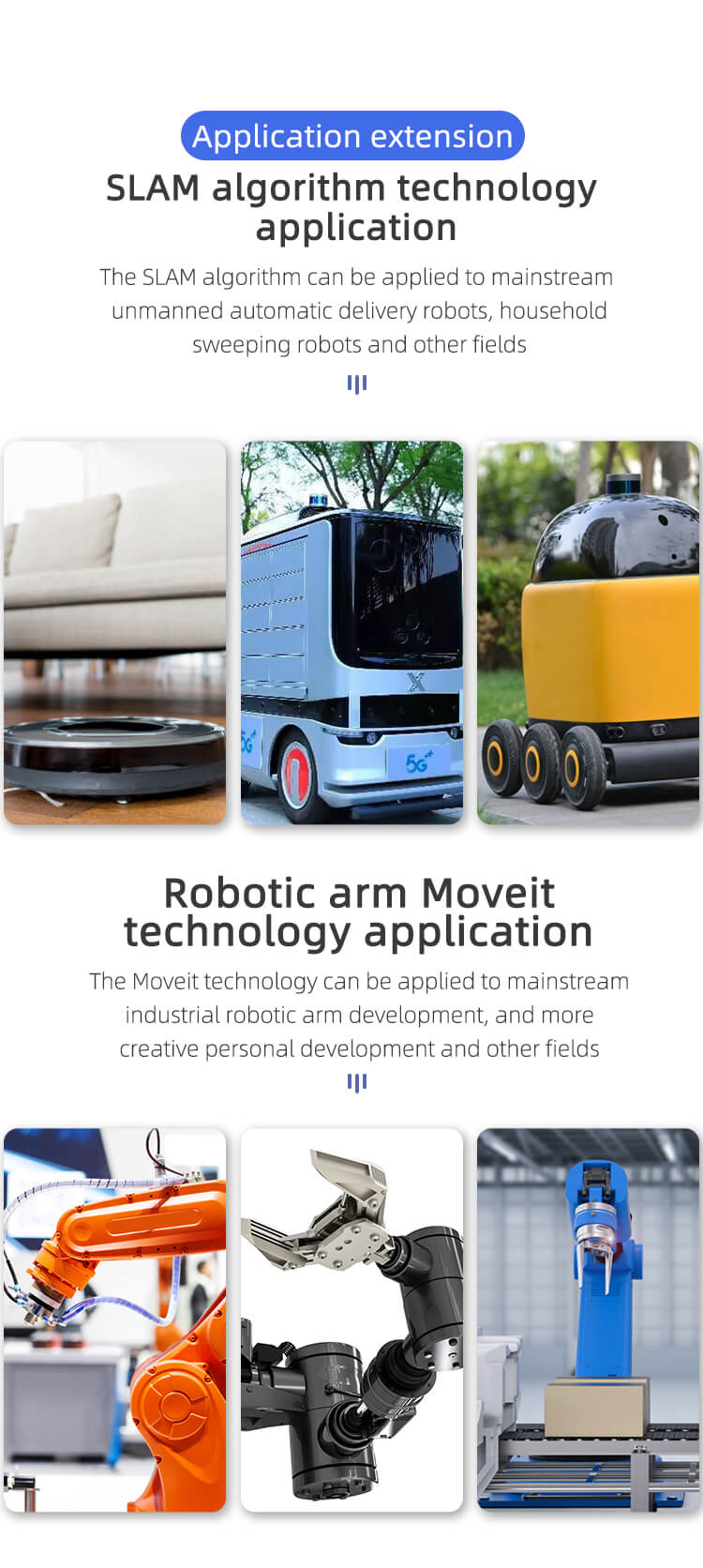
SLAM mapping and navigation:Cooperating with the XR-ROS human-computer interaction system, SLAM lidar mapping and automatic navigation functions can be realized through APP or virtual machine, and new routes can be automatically planned to avoid obstacles encountered in the process of travel.
Moveit! Intelligent robotic arm motion planning:Through the Moveit! Smart Robotic Arm plug-in, the motion path planning function of the manipulator can be realized, and automatic grasping and collision avoidance can be realized.
Opencv visual line inspection:Through camera machine vision, it can independently judge the black line on the road, and follow the black line to realize tracking and driving.
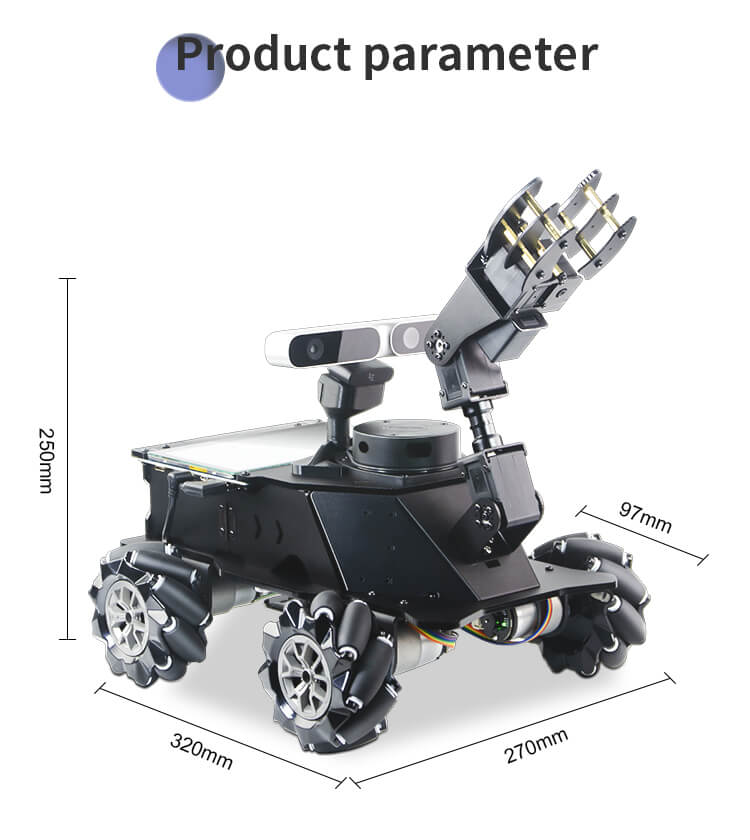
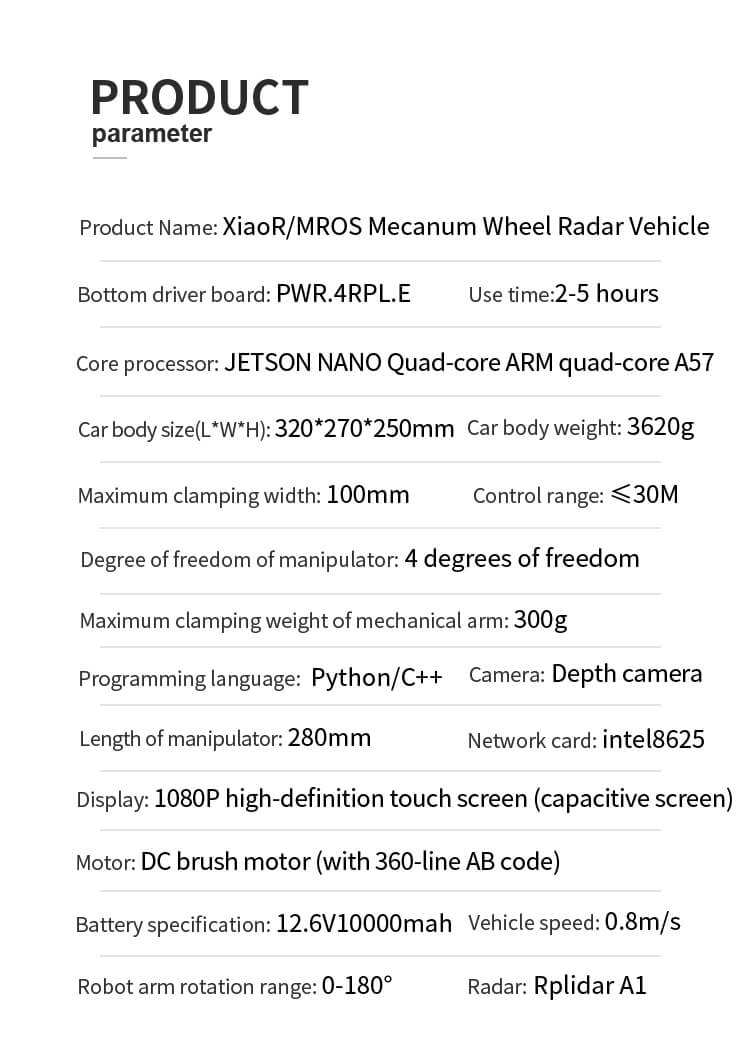
| Body structure parameters | |
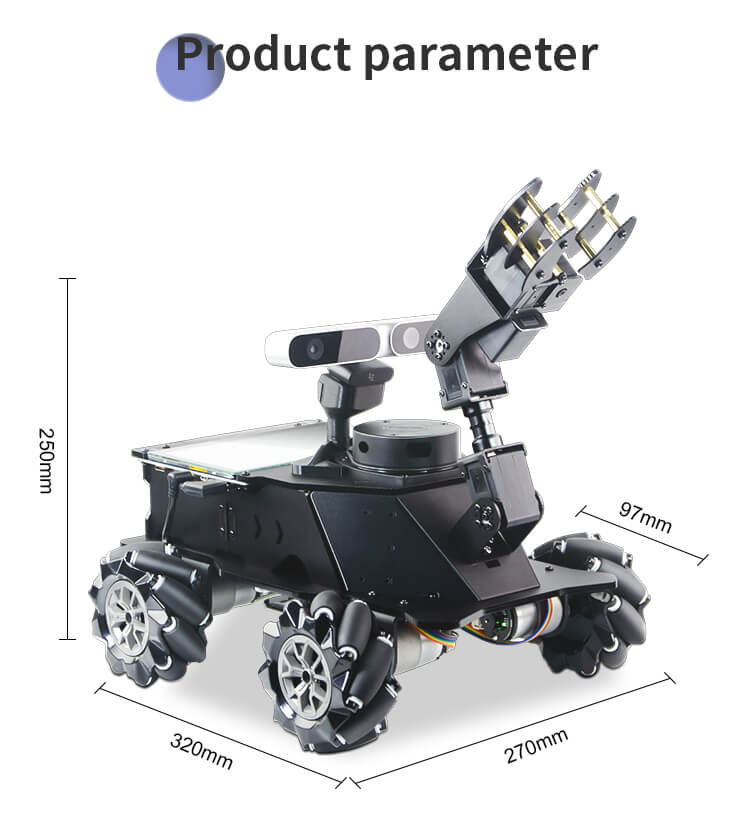
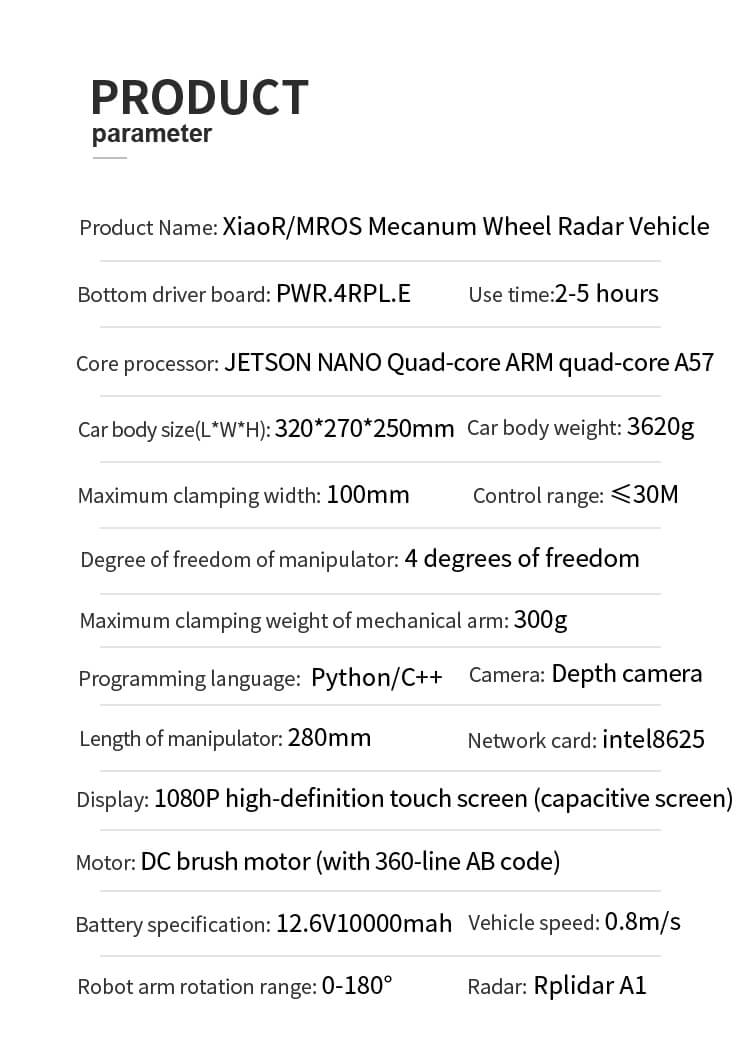
| Size | 542*265*386mm |
| Net weight | 3.4kg |
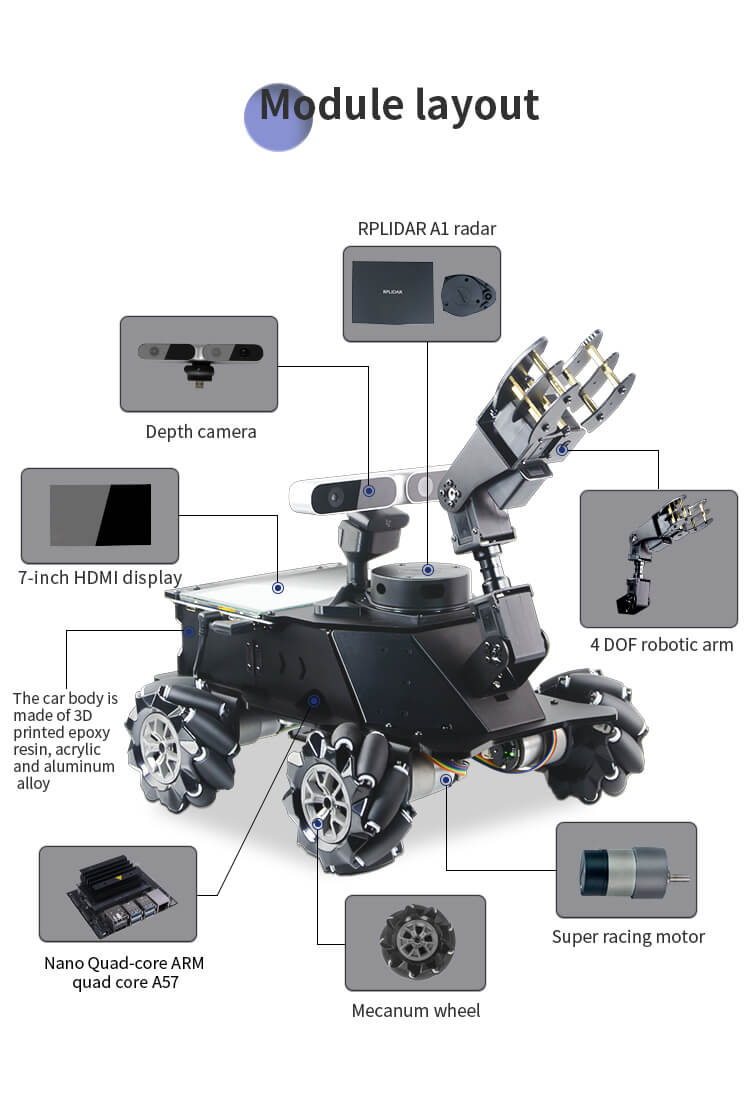
| Material | 3D printing epoxy resin/acrylic/aluminum alloy |
| Process | Anodizing |
| Colour | Black |
| Traveling mechanism | 4WD mecanum wheel |
| Speed | 0.8m/s |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|

Shipping and delivery Information
Shipping Policy
Shipping time:Within 3 days after you pay for the order.
Start Date - All Time
End Date - All Time
Order weight less than 1000g - You have to pay shipping fee, $15 by default (small package Air).
Order weight more than 1000g and less than 2000g - You have to pay shipping fee, $25 by default.
Order weight more than 2001g and less than 3000g - You have to pay shipping fee, $35 by default .
Order weight more than 3001g and less than 4000g - You have to pay shipping fee, $45 by default .
Order weight more than 4001g and less than 5000g - You have to pay shipping fee, $55 by default.
Some of our products come with battery and motor. we will select suitable express to ship, such as: DHL, UPS, Fedex, or special line, depending on your country.
Distributors are not eligible for free shipping.
Shipping Method
|
Shipping Method |
Delivery Time(business day) |
Tracking No |
Weight Limit |
|
DHL |
5-7 |
YES |
No |
|
UPS |
5-7 |
YES |
No |
|
Fedex |
7-10 |
YES |
No |
|
Special line |
7-15 |
YES |
No |
|
Small Packets Air |
10-20 |
YES |
No |
After your package is sent out, you can see your tracking number on our website. We will also inform you via email about your tracking number and tracking link.
Customs, Duties and Taxes
Our term is EXW Shenzhen which doesn’t include custom fee. You should expect to pay any amount charged by the government in your respective country. This includes, and is not limited to, duties, taxes and any extra fees charged by the courier company.
About battery: Some countries can't ship batteries, we will send battery cases instead of batteries. You need to buy the battery like the link of this specification, 12V, more than 5A in your country.
Payment & Security
Payment

PayPal
The main Payment method is Paypal. If you have paypal, that is great. You can simply place order and check out with few steps. If you don't have Paypal account, you can register it and pay by Credit or Debit Card.
Pay with Paypal
Pay with Credit or Debit Card
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Estimate shipping