
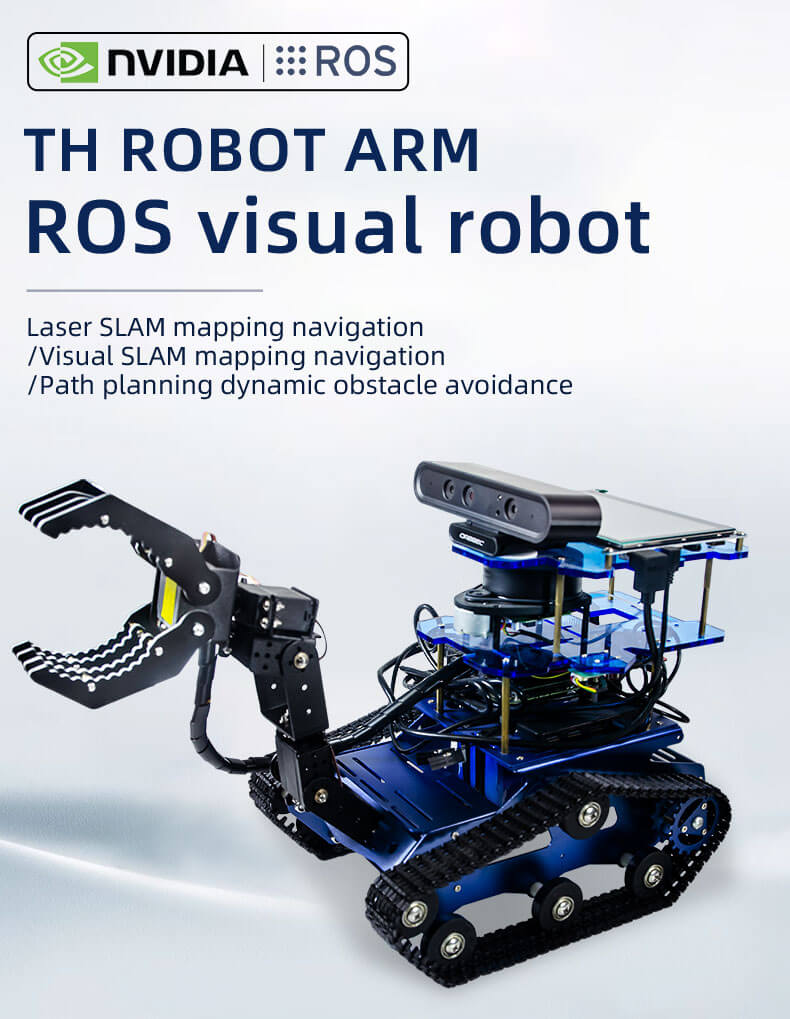
1. Features of TH ROS radar car hardware sensors
The design of TH ROS radar car fully reflects the perfect combination of high technology and practicality. Its core components include a precision robotic arm and a blue crawler chassis. The robotic arm adopts a 4-degree-of-freedom 35KG servo, black appearance, and white markings. It is not only beautiful, but also easy to operate and maintain. The claw-like design at the end can flexibly grasp and fix objects of various shapes and sizes, showing extremely high operating accuracy and flexibility.


2. Application of ROS visual system
The ROS (Robot Operating System) visual system used by the TH ROS radar car is one of the core highlights of the product. As an open source system that provides a flexible framework for robot software development, ROS supports a wide range of hardware interfaces and algorithm integration, enabling robots to efficiently perform environmental perception, decision making and action execution.

3. NVIDIA technology empowers performance
As the world's leading graphics processor (GPU) and artificial intelligence computing platform provider, NVIDIA's technology brings powerful computing support and intelligent optimization to the TH ROS radar car. NVIDIA's GPU provides robots with high-speed, low-latency parallel computing capabilities, allowing complex image processing, deep learning and other tasks to be completed efficiently.

Through the empowerment of NVIDIA technology, the TH ROS radar car can process and analyze massive data from laser radar and visual sensors in real time, achieving more accurate environmental perception and decision-making. At the same time, NVIDIA also provides a wealth of development tools and library files to help developers easily integrate advanced AI technologies into robot systems, further improving the robot's intelligence level and adaptability.
4. Potential applications and advantages in the field of industrial automation
TH ROS radar car has broad application prospects and significant advantages in the field of industrial automation. First, on the production line, the robot can replace manual labor to complete heavy, repetitive or dangerous tasks, such as material handling, product assembly, etc., to improve production efficiency and safety. Its precise grasping and operation capabilities ensure high accuracy and low error rate of operations, effectively reducing production costs and waste.

Finally, TH ROS radar car also has high scalability and customization capabilities. Through modular design and flexible configuration of ROS system, users can adjust the robot's functional modules and algorithm parameters according to actual needs to achieve personalized customization and optimization. This flexibility not only meets the diverse needs of different industries and scenarios, but also provides strong support for the digital transformation and intelligent manufacturing upgrade of enterprises.
In summary, as a high-tech product that integrates advanced hardware sensors, ROS vision system and NVIDIA technology, TH ROS radar car has shown great potential and advantages in the field of industrial automation. With the continuous advancement of technology and the continuous expansion of application scenarios, we have reason to believe that this robot will play a more important role in the future and promote industrial automation to a higher level.