

The main body of the Raspberry Pi 6-DOF robotic arm is an AI intelligent robotic arm developed based on the Raspberry Pi embedded system. Through the inverse kinematics algorithm, the robotic arm can accurately reach the specified position within the specified range. Combined with the camera, it can realize the recognition and precise grasping of objects. Combined with the camera, it can do a lot of intelligent recognition functions and has high playability.
This product realizes wireless remote control through WiFi and uses PC software for control. You can install the software on the computer to realize full function control of this product.
This product has a video transmission function, which can transmit the video image collected by the robot's eyes (camera) to the control terminal for display in real time.
The robotic arm can realize PC-side host computer control and PS2 handle control. It has intelligent visual function, realizes real-time video image transmission, and realizes a variety of intelligent visual gameplay such as color recognition, face recognition, and label recognition. Realize 5 gesture recognition functions. Realize the capture and tracking function of the target color block by visual positioning of the target color block using the inverse kinematics algorithm of the robotic arm. It can detect objects in the designated identification area, use vision to identify different colors and label codes, calculate the location coordinates and placement angle of the target object, and grab and move to the designated location with the algorithm. Intelligent vision can be used to realize intelligent warehousing and intelligent transfer functions. Combined with the voice expansion package, voice interaction functions such as voice control sorting, mode switching, and voice broadcast can be realized. To realize the memory mode function, the PC software reads and records the angle of each rotation and sends it to the robotic arm in time to learn and repeat the action group.
The 6-DOF AI robotic arm uses Raspberry Pi as the main control and is programmed in python. Smart vision uses an ordinary USB camera and uses OpenCV to realize various visual functions.
The robotic arm is mainly used in teaching demonstration and various robot competitions. The 6-DOF AI robotic arm is more flexible than the traditional robot arm. The function implementation relies on the python language and the powerful library of OpenCV, which makes the function implementation not very complicated.
Key technologies: Raspberry Pi/python/OpenCV/inverse kinematics algorithm
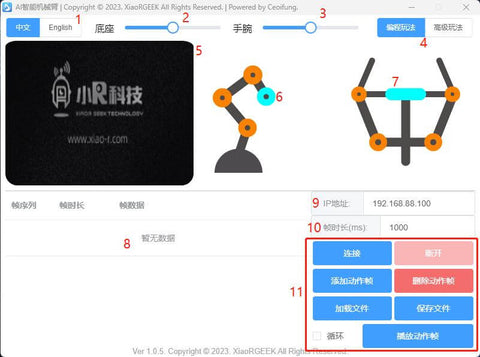
PC software operation interface
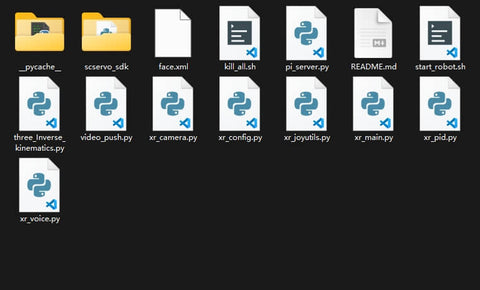
Open Source Programs
Overall parameters of the robotic arm
|
Parameter name |
Parameter details |
|
Size |
229X158X428mm (initial startup posture) |
|
Weight |
1.3kg |
|
Master control |
Raspberry Pi 4B |
|
eMMC |
64GB flash |
|
Video output |
HDMI |
|
Load weight |
Maximum 1KG |
|
Camera |
USB camera |
|
Interface |
Ethernet interface/micro-HDMI*2/MIPI-DSI/MIPI-CSI/USB3.0 * 2/USB2.0 * 2/type-C power supply interface |
|
Master control system |
Raspbian GNU/Linux 10 (buster) |
|
Power supply voltage |
DC 7.4V |
|
Working current |
1A |
|
Battery capacity |
4000mAh |
|
Battery life |
1 hour |
|
Standby time |
3.5 hours |
|
Degree of freedom |
6-DOF robotic arm |
|
Charging time |
7-10 hours |
|
Capture algorithm |
Inverse kinematics to solve the end joint position |
|
Camera resolution |
1080P |
|
Camera pixel |
5 million |
|
Control method |
WiFi wireless 802.11ac |
|
Control terminal |
PC computer, wireless handle |
|
Programming language |
Python |
Shipping list
The Raspberry Pi six-degree-of-freedom robotic arm is shipped as a whole, and the detailed accessories list is as follows:
Simulated shelves
Robotic arm working map
|
Name |
Description |
|
Robot body*1 |
Assembled and debugged robot body |
|
Charger*1 |
The charger provided with the robot has overcharge protection function. Please do not replace other chargers at will. |
|
Instruction manual*1 |
Guide users to quickly get started with robot control and secondary development courses. |
|
Warranty card*1 |
Free maintenance policy within the warranty period can be enjoyed with the warranty card. Please keep it properly. |
|
Simulated shelf*2 |
Simulated shelf used for advanced gameplay |
|
Work map*1 |
Robot arm working range map |
Product function
|
Name |
Function |
|
Regular gameplay |
Color following |
|
Color sorting |
|
|
QR code sorting |
|
|
Gesture recognition |
|
|
Advanced AI gameplay |
Warehousing operation |
|
Transfer operation |
|
|
Wireless controller control |
The robot generates a WiFi signal after it is turned on. The PC (computer) connects to the robot via WiFi and controls it with dedicated software. |
|
Real-time video transmission |
The video images captured by the car camera are transmitted to the APP or computer control software interface in real time via WiFi to achieve a first-person visual effect. |
|
Wireless controller control |
The robot arm movements are controlled and the mode is switched through a wireless game controller. |