

El robot programable inteligente biónico XR Hexapod J1 está desarrollado en base a la plataforma NVIDIA Jetson Nano. A través del algoritmo cinemático inverso, puede imitar vívidamente el movimiento de las criaturas hexápodas en la naturaleza, lo cual es muy interesante.

El robot XR Hexapod J1 realiza un control remoto inalámbrico a través del WiFi integrado de la máquina y utiliza una aplicación para controlarlo. Puede instalar la aplicación en su teléfono móvil o tableta Android/iOS para controlarla, o puede controlarla a través de un controlador PS2.

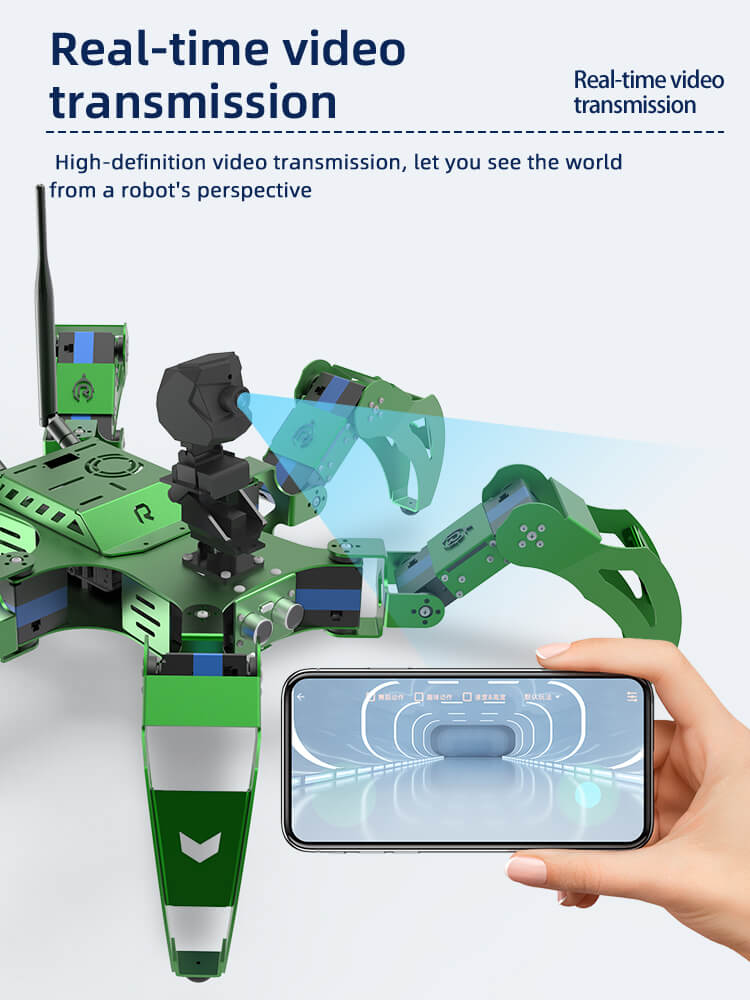
Este producto tiene una función de transmisión de imágenes de video, que puede transmitir las imágenes de video recopiladas por los ojos del robot (cámara HD de 720p) al terminal de control para su visualización en tiempo real, lo que le permite ver el mundo desde la perspectiva del robot.
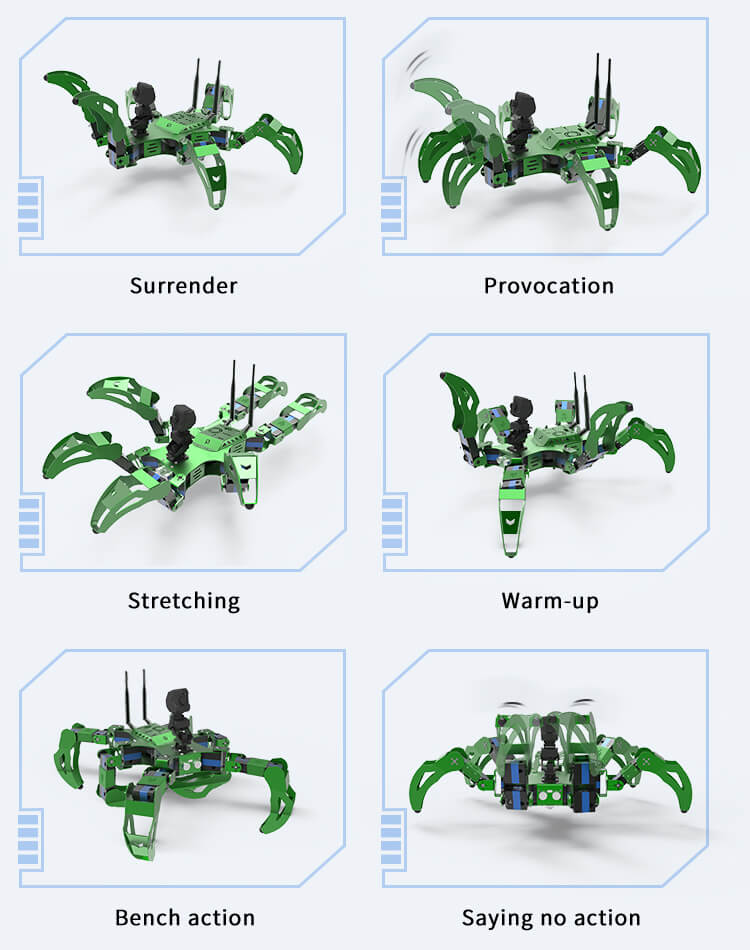
El robot XR Hexapod J1 puede simular 18 tipos de acciones de marcha biónica, como adelante, atrás, izquierda y derecha, rotación, traslación, movimiento diagonal, danza y escalada de criaturas de seis patas. También tiene 12 acciones interesantes incorporadas, lo cual es muy adecuado para museos de divulgación científica, exhibiciones científicas y actividades de actuación en festivales de ciencia y tecnología en campus, competencias de carreras de robots, competencias de habilidades de robots y otros eventos.

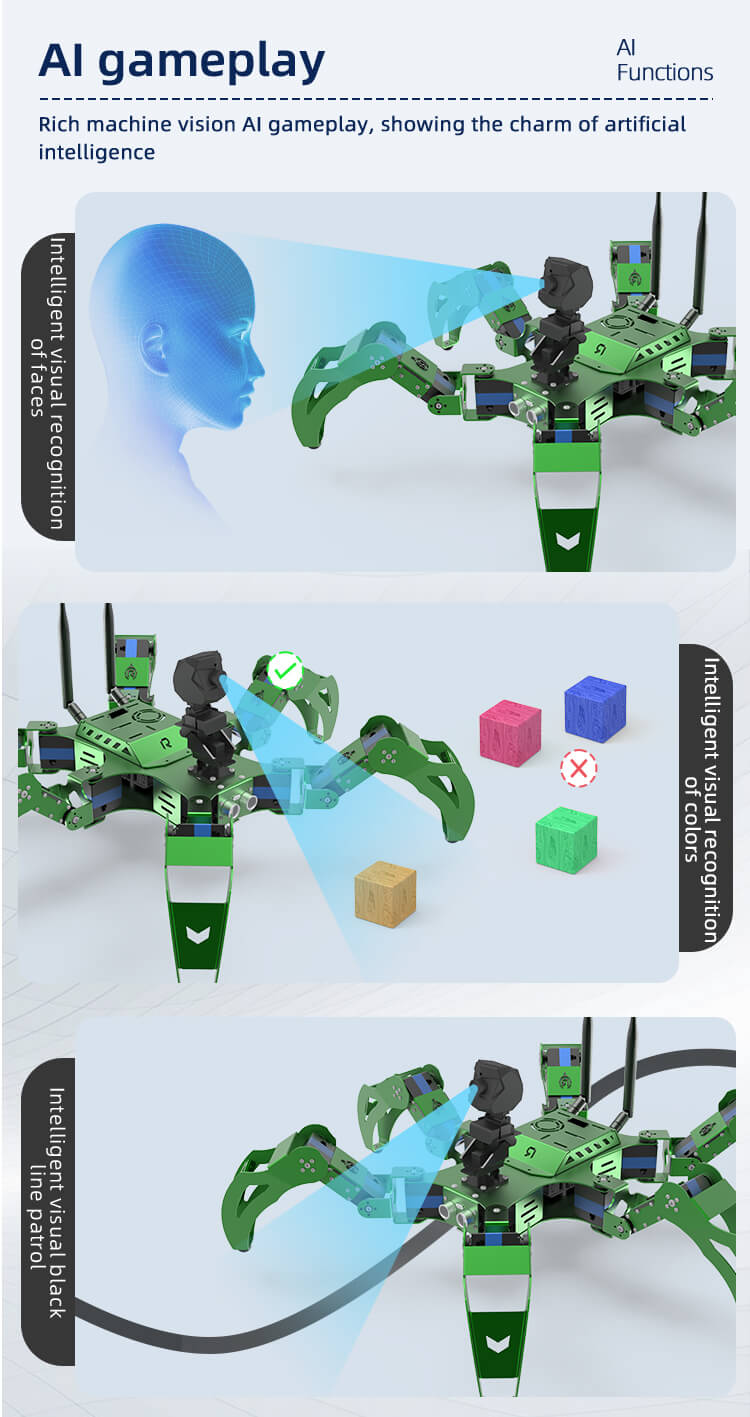
El robot XR Hexapod J1 también tiene funciones de visión artificial de IA, que pueden realizar funciones de inteligencia artificial como seguimiento visual, reconocimiento visual de colores, reconocimiento visual de rostros, reconocimiento visual de códigos QR, etc.
Este producto también proporciona código SDK de desarrollo secundario y una API abierta para que los usuarios la llamen. El desarrollo secundario utiliza Python, un lenguaje de programación muy popular en la comunidad de creadores. Sólo necesita aprender las operaciones básicas de programación de Python y podrá comenzar fácilmente con los movimientos secundarios de este robot. Luego de este desarrollo, podrá utilizarse como plataforma de capacitación en laboratorio de inteligencia artificial para estudiantes de especialidades en información electrónica, inteligencia artificial, Internet de las cosas, computación, automatización, etc. en instituciones de educación secundaria y superior.

Los cursos adjuntos comenzarán con una introducción a los parámetros básicos del robot y lo guiarán a través del control de movimiento del robot, la construcción del entorno de desarrollo secundario, el análisis del código fuente de Python y el conocimiento de la cinemática del robot/cinemática inversa. Es a la vez educativo y entretenido, lo que te permite aprender jugando. Aprenda valiosos conocimientos de robótica en la escuela secundaria.
El producto está programado utilizando el lenguaje Python y proporciona un SDK de código fuente de desarrollo secundario y materiales de curso de soporte, lo que facilita el inicio de la capacitación práctica y el desarrollo.
Tecnologías clave: Python/biónica hexápoda/algoritmo cinemático/algoritmo cinemático inverso/Jetson Nano
| Nombre del parámetro | Detalles de los parámetros |
| Tamaño | 300X300X250 mm (posición de espera) |
| Peso | 3,2 kilos |
| control principal | Jetson Nano ARM A57 de cuatro núcleos a 1,43 GHz. |
| DDR | 4 GB |
| Interfaz | 1 PCIE de 1/2/4, 1 USB 3.0, 3 USB 2.0 |
| Sistema de control principal | ubuntu |
| Tensión de alimentación | CC 8 V |
| Corriente de trabajo | 9A |
| Velocidad máxima | 25 cm/s |
| Capacidad de la batería | 4000mAh |
| Duración de la batería | 1 hora |
| modelo servo | XR-S270 |
| Grado de libertad | Cardán de 18 DOF + 2 DOF |
| Tiempo de carga | 7-10 horas |
| tipo de marcha | marcha delta |
| Algoritmo de marcha | Solución de cinemática inversa. |
| Resolucion de la camara | 720P |
| Píxel de la cámara | 1 millón |
| Distancia de control | 20M |
| Método de control WiFi inalámbrico | 802.11b/g/n |
| terminales de control | Teléfono móvil, PAD, ordenador PC |
| Lenguaje de programación | Pitón, C++ |
| Parámetros de la placa de controlador central | ||||||||||||||||||
|