
Noticias

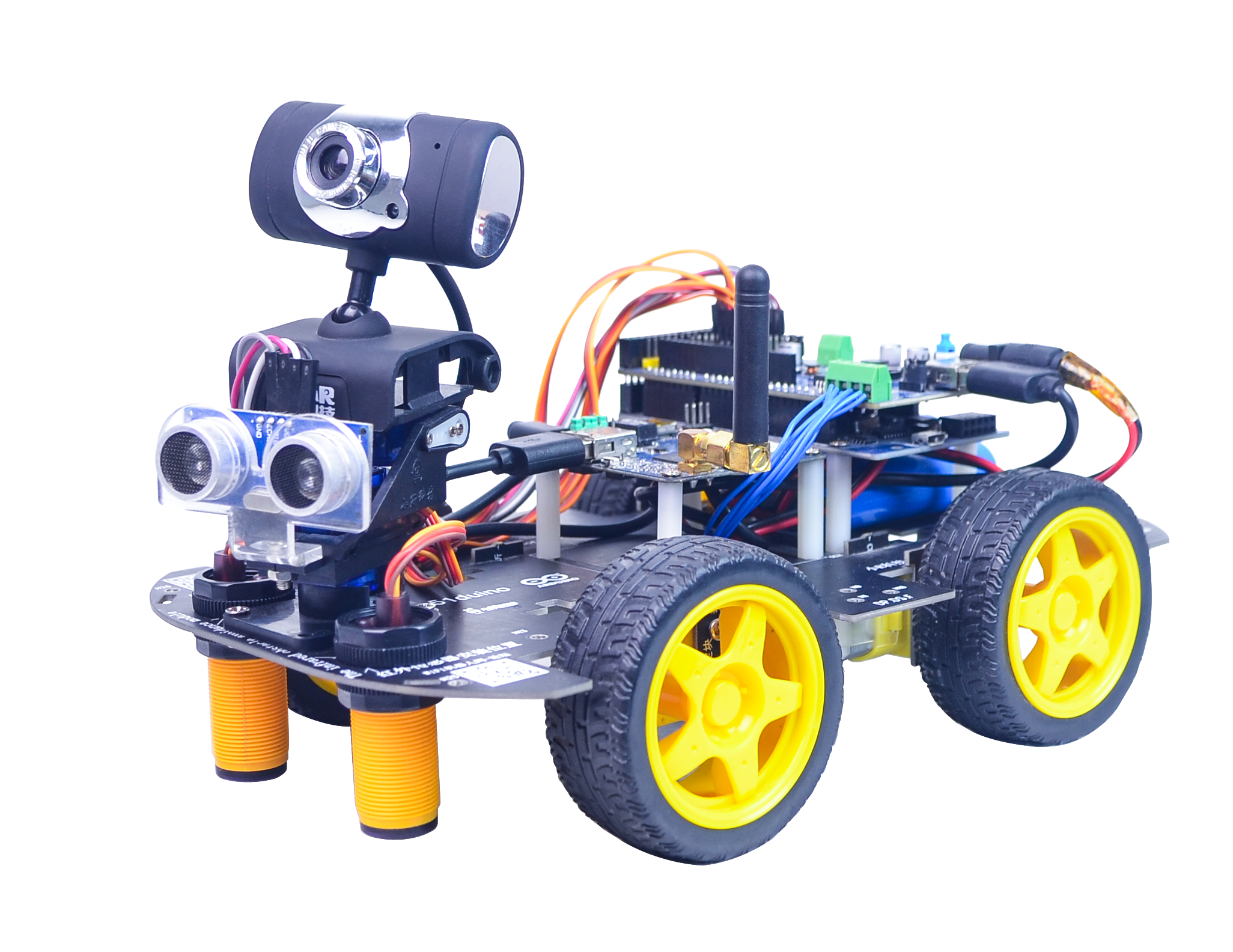
Coche robot inteligente MINI tanque
Presenta el coche robot inteligente MINI que puede ser controlado por Arduino o Raspberry Pi.

Descripción general del coche robot de radar Jetson Nano Ros con pantalla táctil de 7"
Jetson Nano Ros Slam Radar Robot Car con introducción de pantalla táctil de 7".
Manual de funcionamiento básico del robot Raspberry Pi ROS V1.0
Enseñarle el manual de operación básico Cómo operar el automóvil robot inteligente Raspberry Pi ROS.

Descripción general del coche robot de radar Ros con RPi
Descripción general de los parámetros y funciones del coche robot ROS radar raspberry pi.

Método de solución del coche robot ROS
Solución El problema de la pantalla blanca aparece cuando se utiliza una máquina virtual para controlar un coche robot ROS.
Análisis del código del coche robot del modo de escape de la línea de patrulla
Análisis del coche robot del código de modo de escape y patrulla de línea del programa
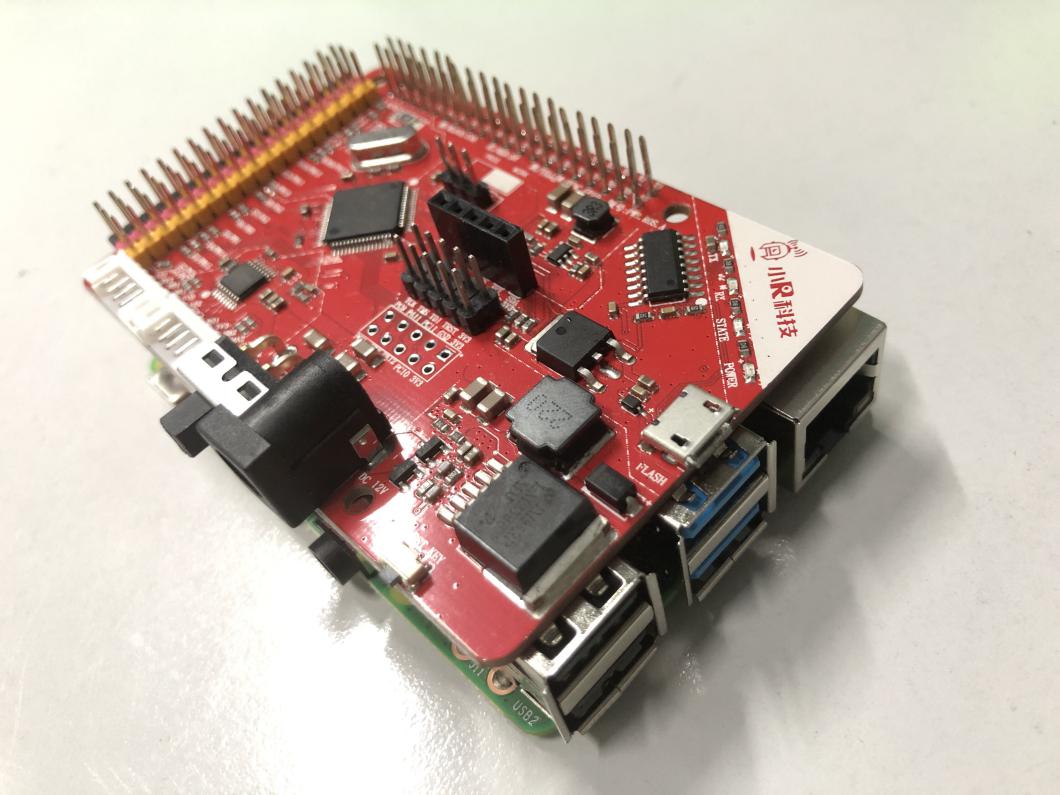
Placa de controlador de robot de coche inteligente WIFI/Bluetooth
Descripción de WIFI/Bluetooth Smart Car Robot Driver Board
Las instrucciones de la API de la plataforma de control de automóviles robot
Las instrucciones de la llamada API de la plataforma de control de robot de coche inteligente WIFI/Bluetooth
El código fuente del coche robot.
La estructura del código fuente de la placa de controlador del estudio sobre el automóvil robot y cómo fusionar las nuevas funciones lanzadas por el estudio y expandir sus propias funciones.
Cómo conectar nuestro coche robot a Internet y controlarlo a escala global. (con imagen)
Sabíamos cómo hacer un robot de automóvil inteligente WIFI, por lo que este tutorial presenta específicamente cómo conectar nuestro robot a Internet y luego podemos controlarlo a escala global.
Llevarlo al automóvil robot WIFI: para comprender los principios básicos
Llevarlo al automóvil robot WIFI: para comprender los principios básicos
El coche robot WIFI es el sueño de la infancia de muchas personas, mi de...