
Noticias
Master Robotics with the Ultimate ROS2-Powered Educational Robot Car – 4 Chassis Options for Any Environment
Dreaming of building your own intelligent robot that can navigate the world, recognize objects, and learn from its surroundings? Stop dreaming and ...
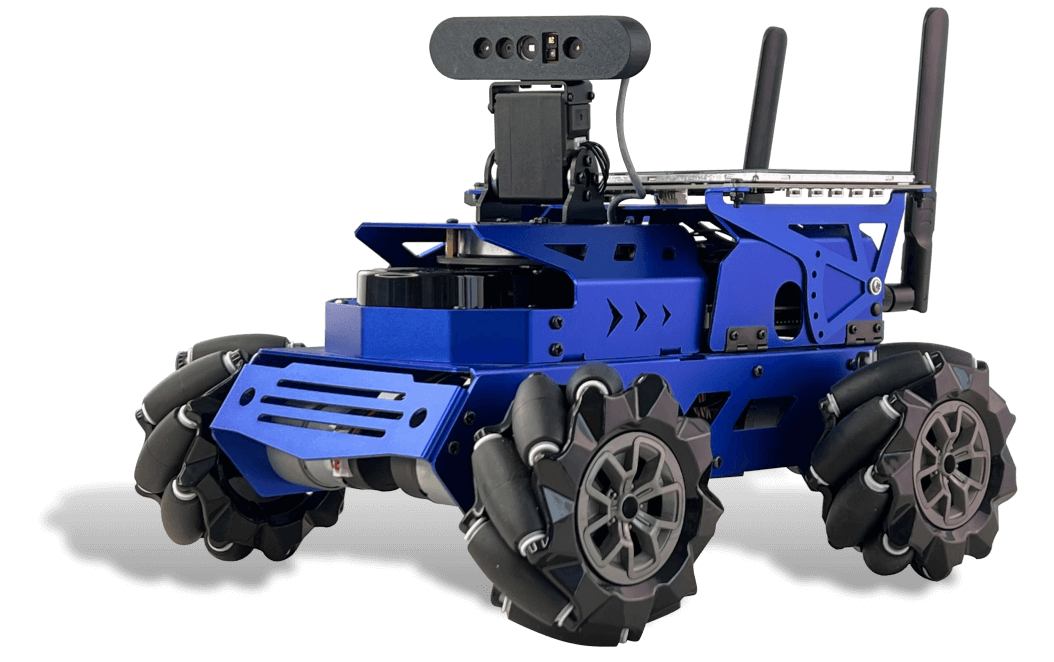
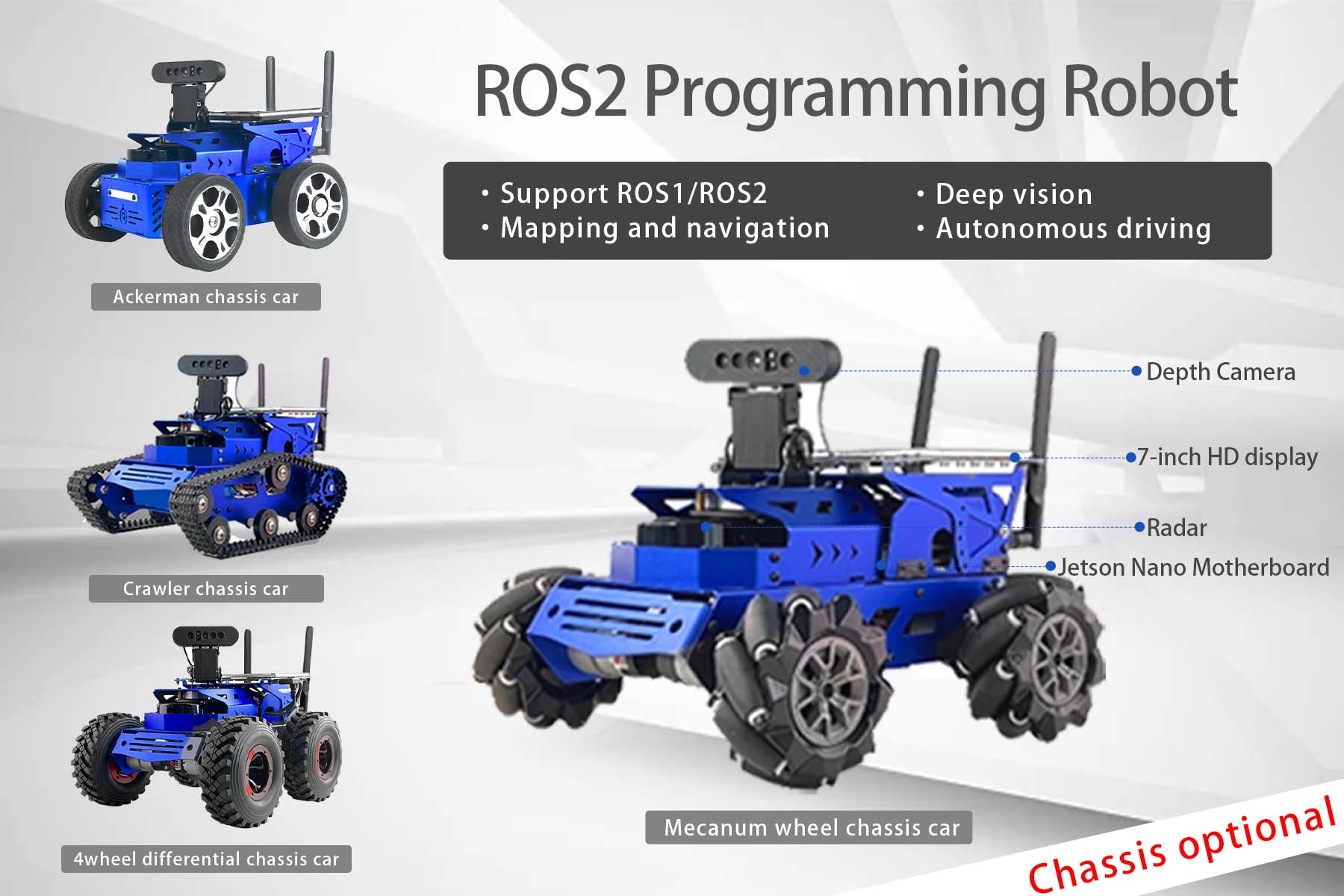
XR-ROSHunter Mecanum Wheel Autonomous Navigation Robot Parameters
ROSHunter Mecanum wheel autonomous navigation robot is equipped with a series of high-performance hardware, including but not limited to NVIDIA Jetson Nano main control board, high-torque encoder reduction motor, laser radar, 3D depth camera, 7-inch LCD display and programmable RGB lights. These high-performance hardware not only give ROSHunter excellent motion control and environmental perception capabilities, but also make it more accurate and efficient when executing ROS SLAM algorithms for map construction, path planning, deep learning and visual interaction tasks.

Perfect encounter between ROS and Jetson nano XR phage bionic six-legged hexapod spider robot
Hexapod walking mechanism: The XR bionic hexapod spider robot uses 18 XR-S270 35KG bi-weekly serial bus servos as the hexapod walking mechanism motion joints, which gives it excellent terrain adaptability. Whether it is in rugged mountains, muddy swamps or narrow gaps, it can shuttle freely.
Intelligent perception system: Combined with the sensor interface of ROS, the XR bionic hexapod spider robot can obtain environmental information in real time, and process and analyze it through algorithms such as deep learning. This enables the robot to more accurately identify targets, judge obstacles and plan paths.
Intelligent perception system: Combined with the sensor interface of ROS, the XR bionic hexapod spider robot can obtain environmental information in real time, and process and analyze it through algorithms such as deep learning. This enables the robot to more accurately identify targets, judge obstacles and plan paths.

Jetson Nano Phage ROS LiDAR Hexapod Robot Performance introduction
In summary, the Jetson Nano ROS LiDAR hexapod robot from Little R Technology has demonstrated outstanding performance with its powerful main control system, precise LiDAR and depth camera, excellent hexapod structure and terrain passing ability, advanced human-computer interaction and inverse kinematics algorithms, and powerful software and algorithm support. These features make the robot have extensive potential and application value in navigation, interaction and intelligent applications.

When Corgi Robot Dog Meets ROS: The Collision and Fusion of Intelligent Robotics
When the Corgi robot dog meets ROS, the collision and fusion between the two show us the infinite possibilities of robotics technology. In the future, with the continuous advancement of technology and the continuous expansion of application scenarios, we have reason to believe that robotics technology will bring more convenience and surprises to mankind. At the same time, we also look forward to more innovators and practitioners joining in the research, development and application of robotics technology to jointly promote the development and progress of robotics technology.
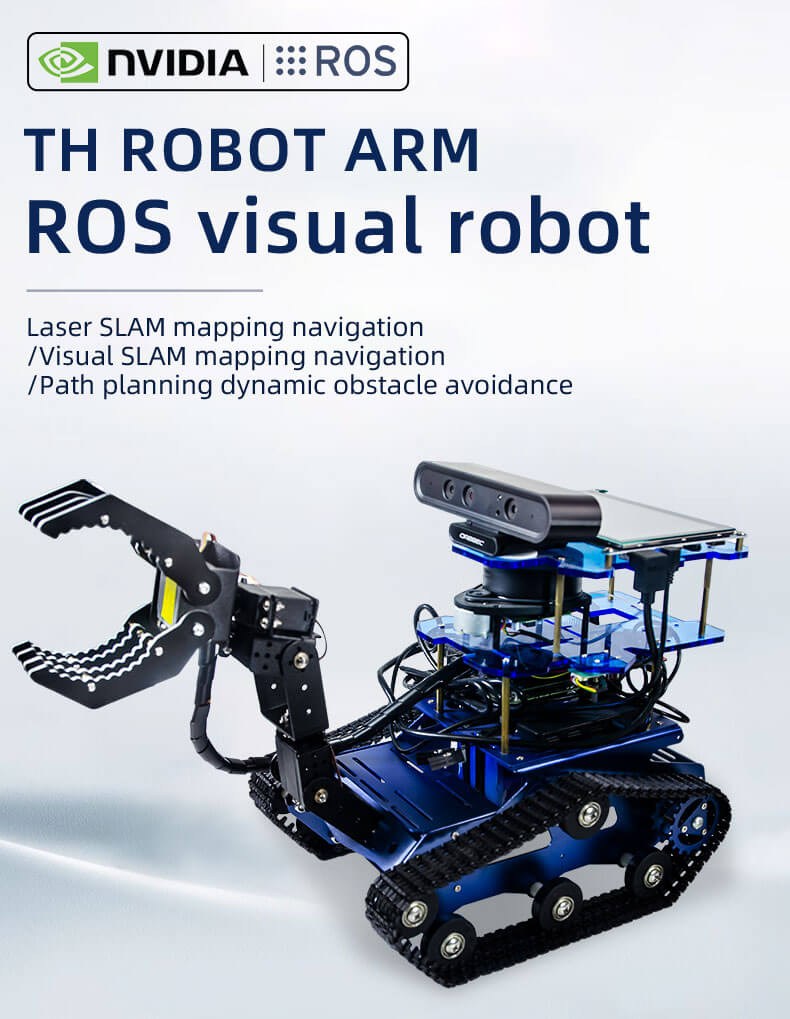
How to use ROS (Robot Operating System) to create AI robot car?
XR TH ROS Robot car uses anodized aluminum alloy as the chassis, Jetson Nano main control board, depth camera, 8400mAh lithium battery with charge protection, DC brush motor (comes with 360-line AB coding), nine-axis gyro Rotator, Rplidar A1 radar, 7-inch 1080p high-definition touch screen (capacitive screen), 4-degree-of-freedom robotic arm, etc.
The learning tool of ROS2- ROS2 Hunter smart robot car
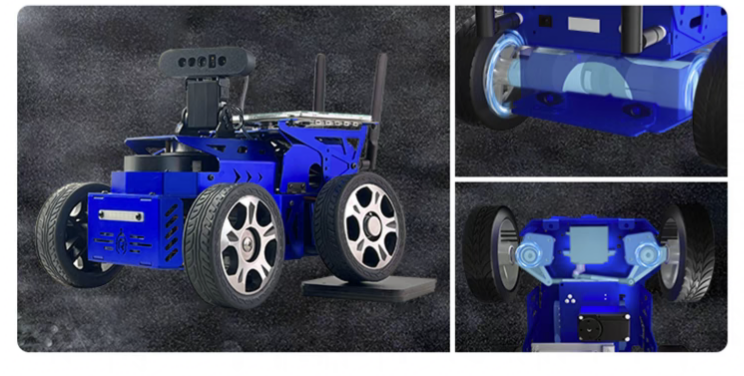
After the ROS2 Hunter intelligent robot car uses the Ackerman chassis, its flexibility and performance have been greatly improved, and it has a wider range of usability. It is also more conducive to the development of research projects in autonomous driving, the automotive industry and other related industry projects. .
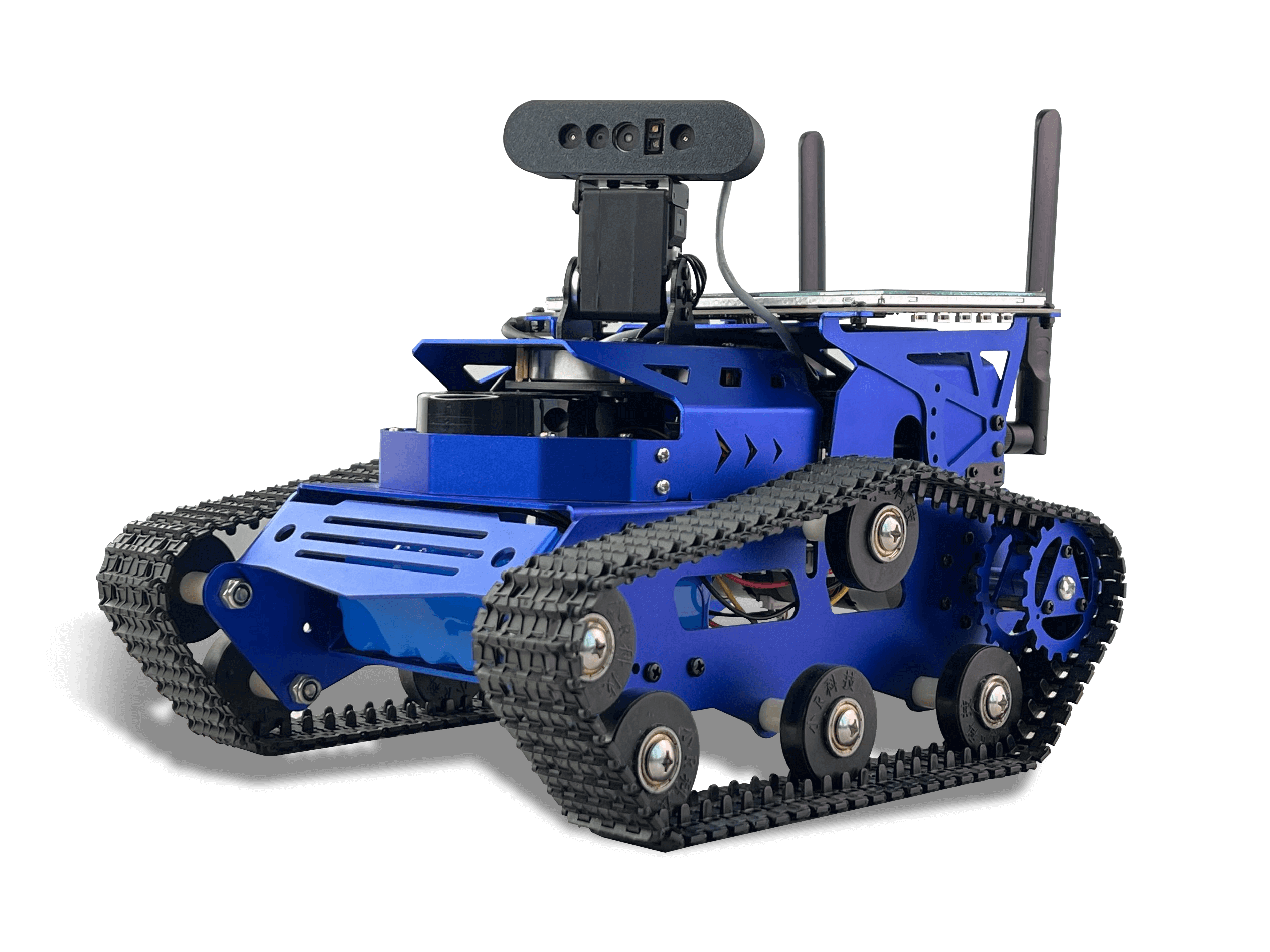
ROS2Hunter Ackerman tracked SLAM autonomous navigation programmable intelligent robot
ROSHunter Ackerman tracked ROS2 SLAM autonomous navigation programmable intelligent robot car is designed by XiaoR Technology for in-depth exploration of unmanned driving and robot navigation technology.
It is based on NVIDIA Jetson Nano and uses the advanced ROS2 framework. It is a professional-grade autonomous navigation car.