
Noticias
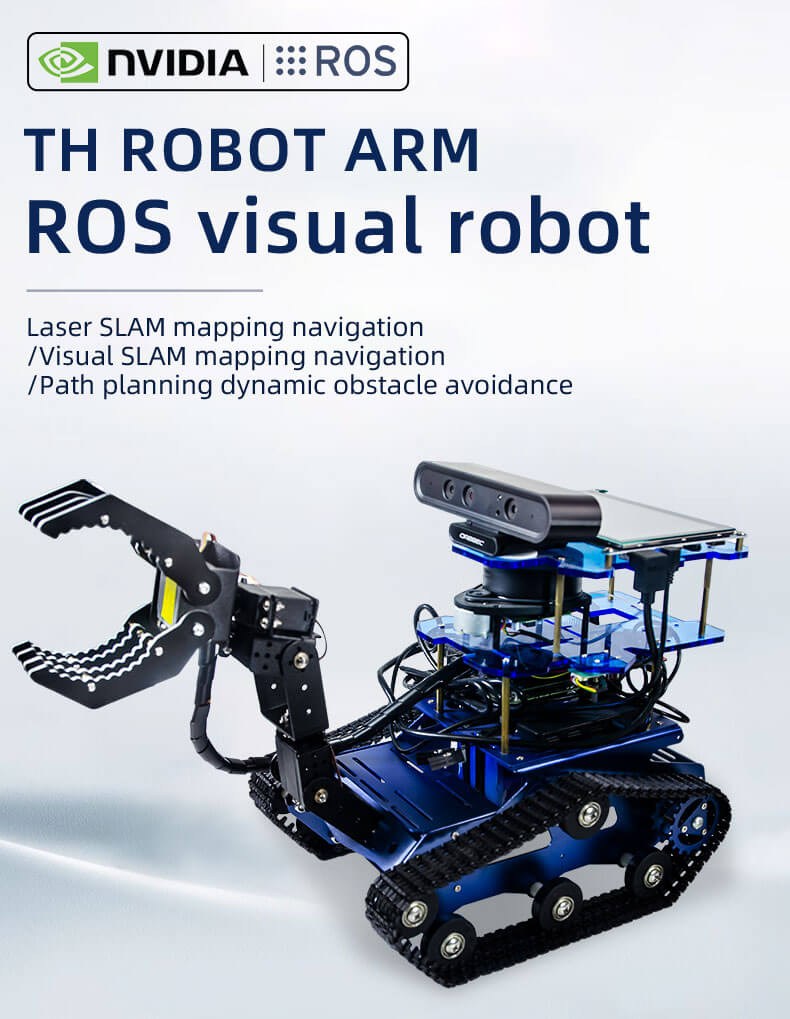
How to use ROS (Robot Operating System) to create AI robot car?
XR TH ROS Robot car uses anodized aluminum alloy as the chassis, Jetson Nano main control board, depth camera, 8400mAh lithium battery with charge protection, DC brush motor (comes with 360-line AB coding), nine-axis gyro Rotator, Rplidar A1 radar, 7-inch 1080p high-definition touch screen (capacitive screen), 4-degree-of-freedom robotic arm, etc.
The Guide to the Best Robotic Kits for Arduino Learners
The Arduino Starter Kit emerges as an ideal entry point for beginners keen on delving into the world of electronics and coding, offering an array o...

How the XR-wifi video robot tank became students’ most popular study partner
the desktop-level XR-wifi video robot tank car has become a popular choice due to its interactivity, fun, STEM education practice platform, problem-solving ability, teamwork and communication skills, adaptability, creativity and cutting-edge technology experience. The most popular study partner among students.

A brief discussion on the relationship between K12 AI bionic intelligent programmable robot dog and K12 education
the K12 AI bionic intelligent programmable robot dog can also lay the foundation for students’ future career development. With the rapid development of artificial intelligence and robotics, there is an increasing demand for talents with programming and robotics skills. By learning to control robot dogs, students can understand and master these skills in advance and prepare for future career development.
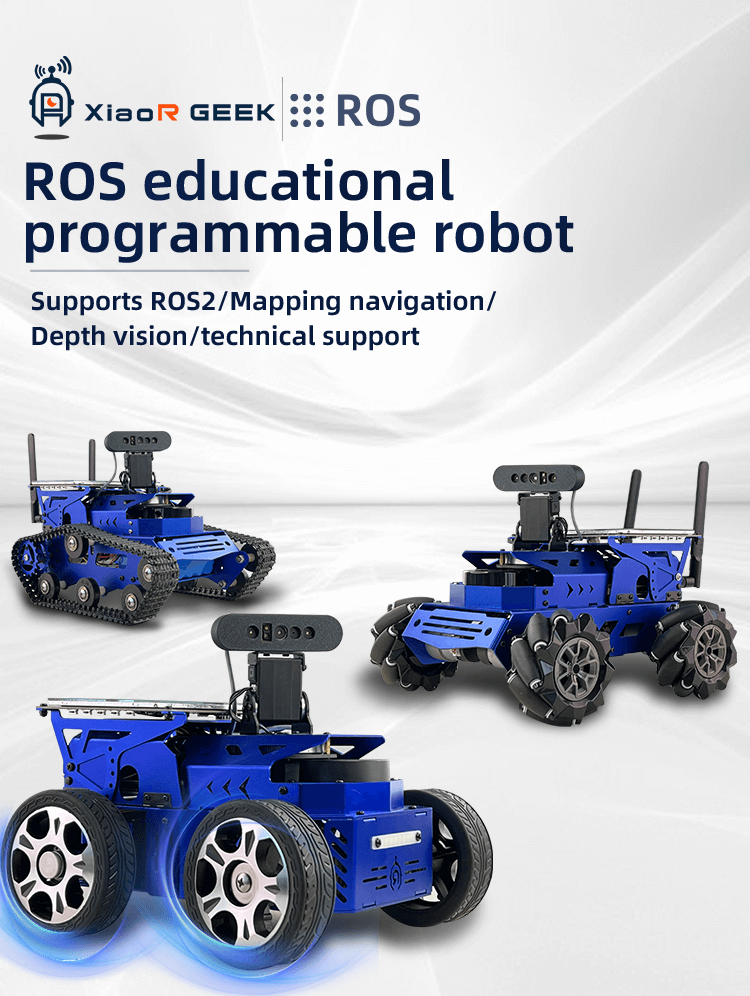
Jetson Nano ROS2 Hunter Ackerman educational programmable autonomous navigation smart robot car
ROS2 Hunter Ackerman educational programmable autonomous navigation smart robot car is designed by XiaoR Technology for in-depth exploration of unmanned driving and robot navigation technology. It is based on NVIDIA Jetson Nano and uses the advanced ROS2 framework.

Robot educativo STEM inteligente programable: la integración y aplicación de tecnología de automatización e información electrónica
Los robots educativos inteligentes programables, como destacados representantes de la información electrónica y la tecnología de automatización, están trayendo cambios profundos y posibilidades ilimitadas al campo de la educación moderna. Esperamos que estos robots desempeñen un papel más importante en los próximos días y aporten más sabiduría y poder a la educación humana.

Aplicaciones industriales y de investigación de redes neuronales de robots inteligentes y aprendizaje inteligente.
En la fabricación industrial, los robots inteligentes pueden completar de forma autónoma diversas tareas en la línea de producción, mejorando la eficiencia de la producción y la calidad del producto. En la atención médica, los robots inteligentes pueden ayudar a los médicos en operaciones quirúrgicas, capacitación en rehabilitación y otras tareas, reduciendo la carga de trabajo del personal médico. En los servicios domésticos, los robots inteligentes pueden proporcionar servicios de limpieza, cocina, educación y otros para mejorar la comodidad y el confort de la vida familiar. En la agricultura, los robots inteligentes pueden realizar operaciones automatizadas de siembra, fertilización, cosecha y otras operaciones, mejorando la eficiencia de la producción agrícola y reduciendo los costos. En educación, el aprendizaje profundo de redes neuronales, la detección de objetivos de aprendizaje automático, etc., se pueden aplicar en entornos de pruebas de transporte inteligentes, así como en la construcción de entornos de pruebas industriales 5.0, entornos de pruebas de fábricas inteligentes, pequeñas líneas de producción simuladas a nivel de escritorio, etc.

El auge de los robots programables y las perspectivas de futuro
1. Introducción a los robots programables
2. ¿Qué tipos de robots programables existen?
3. Cómo programar robots programables
4. Ventajas y desventajas de los robots programables
5. Conclusión
2. ¿Qué tipos de robots programables existen?
3. Cómo programar robots programables
4. Ventajas y desventajas de los robots programables
5. Conclusión