
Raspberry Pi ROS Robot – Grundbedienungsanleitung V1.0
1. Die Beschreibung der Laufwerksplatine und der Schnittstelle

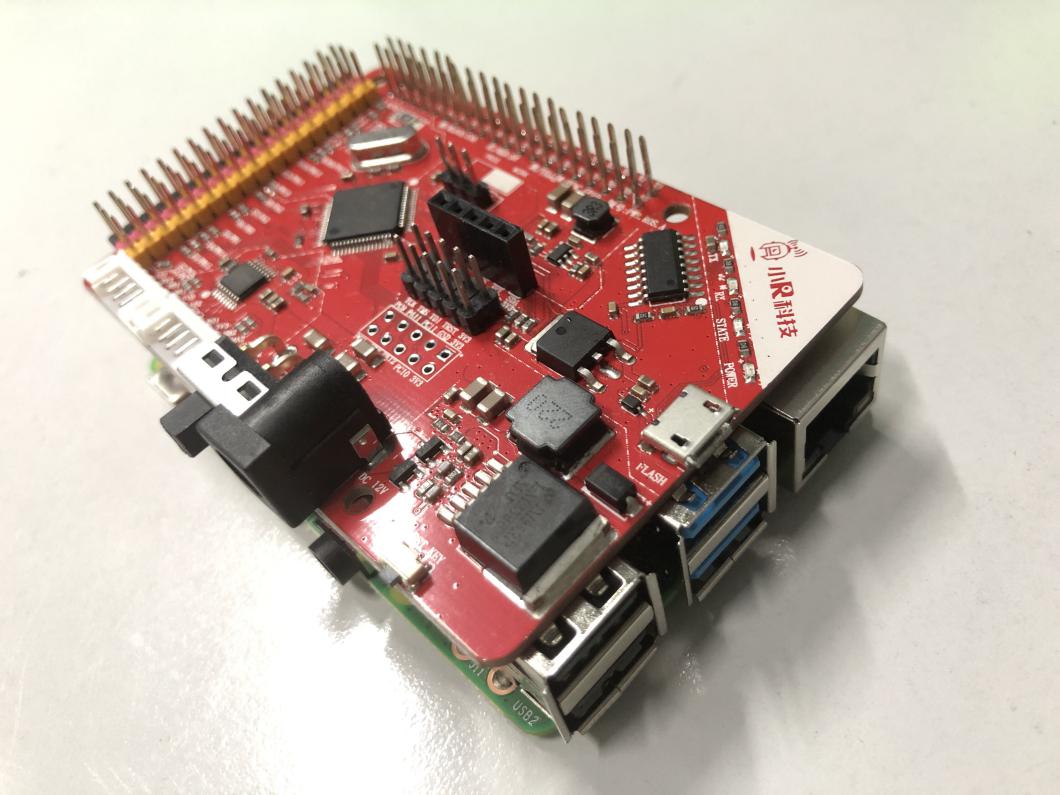
Kombination aus Raspberry Pi und Treiberplatine

Gesamtschaltplan des Raspberry Pi ROS-Roboters

Übersicht über die PWR.ROS.A-Radarroboter-Antriebsplatinenschnittstelle
Das PWR.ROS.A Robot Driver Board ist ein ROS Radar Car Robot Driver Board für Raspberry Pi 3B+/4B/Jetson Nano. Zu seinen Hauptfunktionen gehören:
1, Reglerfunktion: Es kann die Eingangsspannung von 7–12 V DC auf 5 V oder eine andere Spannung umwandeln, um den Hauptchip mit Strom zu versorgen oder den Motor und andere externe Geräte anzutreiben.
2, Motorantrieb: Der Motor wird vom Motorantriebschip angetrieben, um den Motor vorwärts, rückwärts, anzuhalten, zu beschleunigen und abzubremsen.
3, Servoantrieb: Die Treiberplatine mit 8-Wege-Servoantriebs-Ausgangsschnittstelle kann bei Verwendung der internen Spannung zur Servostromversorgung gleichzeitig 8 Antriebe betreiben, deren maximaler Strom 100 mA nicht überschreitet.
4, Sensorantrieb: Die Treiberplatine ist nicht mit GPIO belegt, sie werden direkt an die Unterseite des Raspberry Pi geführt und mit gelben Stiften markiert. Jede GPIO-Gruppe verfügt über 5V- und GND-Stromversorgungsstifte, die rot und schwarz markiert sind.
5, Sensordatenerfassung: einschließlich Motorgeschwindigkeit, IMU-Gyroskop und andere Schlüsseldaten.
2、Grundlegende Benutzeranweisungen
(Wenn der Roboter zusammengebaut ist) Schließen Sie das Netzteil an die Stromschnittstelle der Treiberplatine an. Die Spezifikation der Stromversorgung lautet Gleichspannung 12–15 V, mit einem Strom von mindestens 3 A; Stromschnittstellenspezifikationen von 5.5-2.1.
2.Beim Einschalten des Netzschalters leuchten die LEDs auf der Treiberplatine und dem Raspberry Pi auf und die Bootdaten sind auf dem Display zu sehen.

2.Beim Einschalten des Netzschalters leuchten die LEDs auf der Treiberplatine und dem Raspberry Pi auf und die Bootdaten sind auf dem Display zu sehen. 
Wenn die folgende XR-ROS HCI-Schnittstelle auf dem LCD erscheint, bedeutet dies, dass sie aktiviert wurde.

3. Einführung in das XR-ROS HCI-System
Das XR-ROS HCI-System besteht aus drei Teilen: dem Systemstatus, dem Betriebsprozess und zusätzlichen Funktionen. Die entsprechenden Funktionen sind in der folgenden Tabelle dargestellt.
|
Attribute |
Funktionen |
Anmerkungen |
|
Systemzustand |
Erkennt den Verbindungsstatus von Radar, Treiberplatine und Kamera und zeigt den aktuellen Netzwerkstatus an. |
|
|
Gebrauchsprozedur |
IMU-Kalibrierung einbeziehen -> Karte erstellen -> Karte speichern -> Navigation |
Ohne die Umgebung zu ändern, in der der Roboter arbeitet, ist die IMU-Kalibrierung theoretisch nur einmal erforderlich. |
|
Zusätzliche Funktionen |
Beenden Sie alle Prozesse und verlassen Sie das interaktive System |
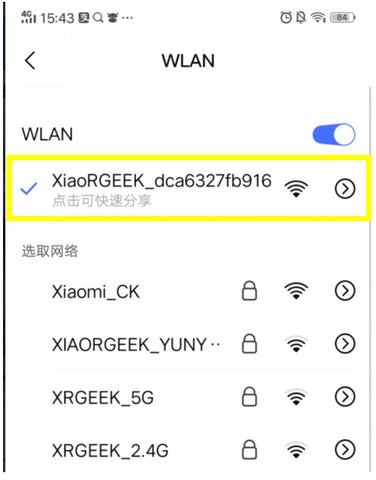
4. Schalten Sie die WLAN-Funktion Ihres Telefons ein, suchen Sie nach dem umgebenden WLAN-Signal, finden Sie das WLAN-Signal beginnend mit XiaoRGEEK und stellen Sie eine Verbindung her.
5. Hinzufügen von Robotergeräten
Öffnen Sie die App, wenn Sie mit dem WLAN-Hotspot des Roboters verbunden sind. Wenn Sie die App zum ersten Mal starten, fordert die App möglicherweise eine Erlaubnis an. Wählen Sie bitte „Zustimmen“ aus. Befolgen Sie dann die Anweisungen der App, um Ihren Roboter hinzuzufügen. Wie im Bild unten gezeigt. 
Als Benutzer müssen Sie lediglich die Master-URI- Option ändern, bei der es sich um die IP-Adresse des Roboters handelt. Dieser Wert ist die „WLAN-IP“, die im Systemstatus des XR-ROS HCI-Systems angezeigt wird. Es wird nicht empfohlen, die Parameter unter „Weitere Konfigurationen anzeigen“ zu ändern, da sie mit den im Systemstatus angezeigten Parametern identisch sind. Die Firmware ist aufeinander abgestimmt und nach der Änderung weist die Software unkontrollierbare Fehler auf. Weitere Konfigurationen anzeigen Die folgende Abbildung zeigt.

6. IMU-Kalibrierung
Um die IMU (Gyroskopsystem) bei der ersten Verwendung des ROS-Roboters zu kalibrieren, klicken Sie im Abschnitt „Betriebsverfahren“ des XR-ROS HCI-Systems auf die Schaltfläche „IMU-Kalibrierung“ und warten Sie, bis der Roboter anzeigt, dass die Kalibrierung erfolgt ist vollendet. IMU-Kalibrierung Dies ist normalerweise nur einmal erforderlich und der Kalibrierungsvorgang kann erneut durchgeführt werden, wenn der Roboter starke Navigationsabweichungen erfährt.

7. Erstellen Sie elektronische Karten
In unbekannten Umgebungen müssen Roboter elektronische Karten über Lidar erstellen, um Referenzdaten für nachfolgende Navigationsbemühungen bereitzustellen. Die erstellte Karte wird im Robotersystem gespeichert und wenn der Kartenerstellungsvorgang erneut durchgeführt wird, überschreibt die neue Karte die alte eins. Natürlich können Sie auch mehrere Karten gleichzeitig speichern, indem Sie sie selbst entwickeln
Klicken Sie im XR-ROS HCI-System auf die Schaltfläche „Karte erstellen“. Das XR-ROS HCI-System fordert Sie mit der Meldung „Bitte vervollständigen Sie die Karte in der App“ auf.

An diesem Punkt wird das WLAN-Symbol in der Roboteroption der APP aktiv, wie im folgenden Bild gezeigt.

Klicken Sie auf die Roboteroption, die APP ruft die Steuerungsseite auf, und wählen Sie dann in der oberen linken Ecke der APP „Klicken Sie hier, um die Seite zu wechseln“ aus. Wählen Sie die Option „Karte erstellen“, und die APP wechselt in den Status „Karte erstellen“.

Wenn Ihr Roboter im Kartenerstellungszustand eine Kamera installiert hat, können Sie das von der Kamera aufgenommene Video auf dem Startbildschirm sehen. Sie können jetzt den Joystick in der unteren linken Ecke der App verwenden, um den Roboter so zu steuern, dass er durch die Karte läuft Aktuelle Arbeitsstelle, in der oberen rechten Ecke der App können Sie die Ergebnisse des Radarscans des Roboters sehen und eine Karte der Umgebung erstellen, Sie können auch auf die Position oben rechts klicken, um zwischen der Steueroberfläche und der zu wechseln Videoschnittstelle.
8 .Karte speichern
Nachdem der Roboter die Kartendaten im Kartenerstellungszustand erfasst hat, muss er sie speichern, und unser Roboter hat zwei Möglichkeiten, die Karte zu speichern.
①.Tippen Sie im Bildschirm „Karte erstellen“ auf den roten Punkt in der unteren rechten Ecke, um die Optionen „Karte aktualisieren“ und „Karte speichern“ anzuzeigen, und wählen Sie „Karte speichern“.
②.Klicken Sie auf der Seite „Bedienungsvorgang“ des XR-ROS HCI-Systems auf die Schaltfläche „Karte speichern“.

Hinweis: Die Funktion zum Speichern der Karte in der APP ist nur im Kartenerstellungsmodus verfügbar.
9.Autonome Navigation
Nachdem Sie eine Karte eines bestimmten Standorts erstellt haben, können Sie den Navigationseffekt erleben.
Klicken Sie auf dem XR-ROS HCI-System auf die Schaltfläche „Navigation“ und wechseln Sie dann auf der APP-Benutzeroberfläche zur Option „Navigation“.

①、Stellen Sie zunächst den Startpunkt entsprechend der aktuellen Position des Roboters ein. Wählen Sie in der Benutzeroberfläche „Navigation“ die Option „Startpunkt festlegen“ in der unteren linken Ecke aus, halten Sie dann die Taste auf der Karte gedrückt und ziehen Sie dann Ihren Wenn Sie mit dem Finger auf die allgemeine Richtung der Nase des Roboters zeigen, wird in der App ein blauer Pfeilcursor angezeigt. Die Richtung des Pfeils entspricht der Richtung der Nase des Roboters. Der Startpunkt muss nicht sehr präzise sein, aber je genauer der Je höher der Startpunkt ist, desto schneller gelangt der Roboter in den autonomen Navigationszustand.

Wählen Sie in der „Navigation“-Oberfläche die Option „Navigationspunkt festlegen“ in der unteren linken Ecke und dann in der APP-Anzeige aus. Wählen Sie auf der Karte das Ziel aus, das der Roboter erreichen soll, und halten Sie es gedrückt. Halten Sie es dann in Richtung der Vorderseite des Autos gedrückt, wenn der Roboter das Ziel erreichen soll. Ziehen Sie Ihren Finger und ein blauer Pfeilcursor erscheint in der APP. Der Pfeil zeigt in Richtung der Vorderseite des Roboters, wenn er sein Ziel erreicht. Passen Sie die Richtung an, lassen Sie den Finger los und der Roboter zeichnet automatisch den Weg zu seinem Ziel auf und führt ihn aus. Wenn er mitten auf der Reise auf ein unerwartetes Hindernis stößt, leitet der Roboter eine neue Route darum herum.

3. Erste Schritte für die Entwicklung
1. Häufig verwendete Entwicklungstools
Putty: Wird für die Remote-Anmeldung beim Raspberry Pi-System über SSH verwendet, um Befehle auszuführen.
Winscp: wird verwendet, um eine Remoteverbindung zum Raspberry Pi-System herzustellen, um Dateien zu übertragen.
SDFormatter: Wird zum Formatieren der TF-Karte verwendet, bevor das Bild auf die TF-Karte gebrannt wird.
Win32DiskImager: Wird zum Brennen des Systemabbilds auf die TF-Karte oder zum Lesen des gesamten Abbilds von der TF-Karte zur Sicherung verwendet.
2.Brennendes System-Image
Hinweis: Wenn Sie die mit dem Produkt gelieferte TF-Karte verwenden, ist ein Robotersystem-Image in die TF-Karte integriert, wenn Sie Ihre eigene leere TF-Karte verwenden oder wenn ein Problem mit dem Originalimage vorliegt Sie müssen das Robotersystem-Image erneut auf die TF-Karte übertragen. Das Tutorial zum Brennen von Systemabbildern lautet wie folgt.
①. Legen Sie die TF-Karte in den Kartenleser ein und stecken Sie dann den Kartenleser in den USB-Anschluss des Computers. Zu diesem Zeitpunkt können Sie sehen, dass der Computer die TF-Karte als USB-Speichergerät erkannt hat.
②.Verwenden Sie SDFormatter, um die TF-Karte zu formatieren.
③.Verwenden Sie Win32DiskImager, um das Robotersystem-Image auf die TF-Karte zu schreiben.
3.Systemarchitektur