

Der bionische intelligente programmierbare Roboter XR Hexapod J1 wurde auf Basis der NVIDIA Jetson Nano-Plattform entwickelt. Durch den inversen Kinematik-Algorithmus kann der Bewegungsgang von Hexapod-Kreaturen in der Natur anschaulich nachgeahmt werden, was sehr interessant ist.

Der XR Hexapod J1-Roboter realisiert eine drahtlose Fernbedienung über das integrierte WLAN der Maschine und nutzt eine APP zur Steuerung. Sie können die APP zur Steuerung auf Ihrem Android/iOS-Mobiltelefon oder Tablet-Gerät installieren oder sie über einen PS2-Controller steuern.

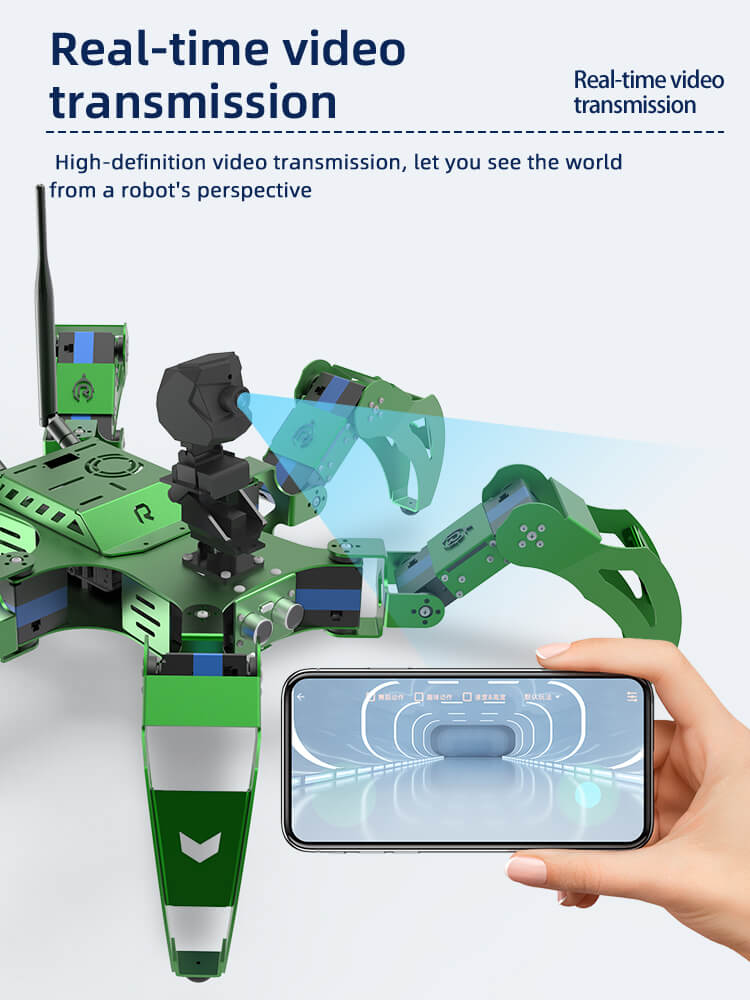
Dieses Produkt verfügt über eine Videobildübertragungsfunktion, die die von den Augen des Roboters (720p HD-Kamera) gesammelten Videobilder zur Anzeige in Echtzeit an das Steuerterminal übertragen kann, sodass Sie die Welt aus der Perspektive des Roboters sehen können.
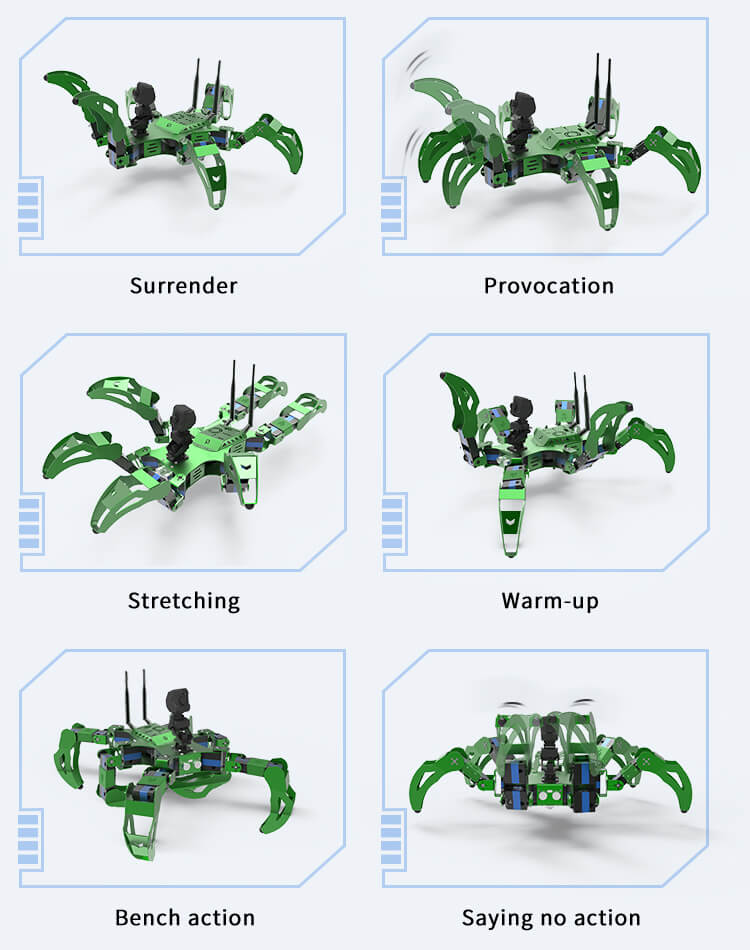
Der XR Hexapod J1-Roboter kann 18 Arten bionischer Gangbewegungen wie Vorwärts, Rückwärts, Links und Rechts, Rotation, Translation, diagonale Bewegung, Tanz und Klettern sechsbeiniger Kreaturen simulieren. Es verfügt außerdem über 12 integrierte interessante Aktionen, die sich sehr gut für Museen zur Popularisierung der Wissenschaft, Campus-Wissenschafts- und Technologiefestivals, wissenschaftliche Präsentations- und Aufführungsaktivitäten, Roboter-Rennwettbewerbe, Roboter-Fähigkeitswettbewerbe und andere Veranstaltungen eignen.

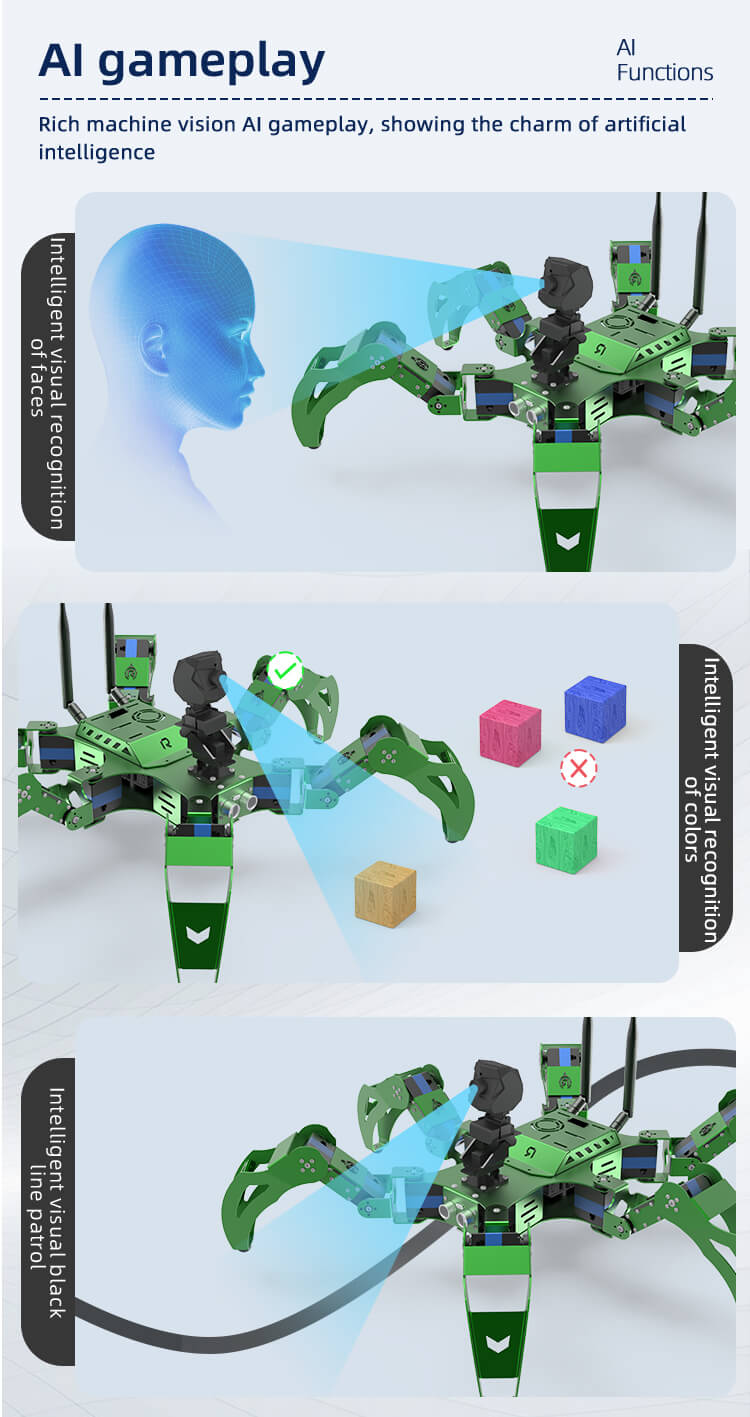
Der XR Hexapod J1-Roboter verfügt außerdem über KI-Bildverarbeitungsfunktionen, die Funktionen der künstlichen Intelligenz wie visuelle Verfolgung, visuelle Erkennung von Farben, visuelle Erkennung von Gesichtern, visuelle Erkennung von QR-Codes usw. realisieren können.
Dieses Produkt bietet außerdem sekundären Entwicklungs-SDK-Code und eine offene API, die Benutzer aufrufen können. Die Sekundärentwicklung nutzt Python, eine in der Maker-Community weit verbreitete Programmiersprache. Sie müssen lediglich die grundlegenden Programmieroperationen von Python erlernen und können problemlos mit den sekundären Bewegungen dieses Roboters beginnen. Nach dieser Entwicklung kann es als Laborausbildungsplattform für künstliche Intelligenz für Hauptfächer in den Bereichen elektronische Information, künstliche Intelligenz, Internet der Dinge, Computer, Automatisierung usw. in weiterführenden und höheren Bildungseinrichtungen verwendet werden.

Die beigefügten Kurse beginnen mit einer Einführung in die grundlegenden Roboterparameter und führen Sie durch die Bewegungssteuerung des Roboters, den Aufbau einer sekundären Entwicklungsumgebung, die Analyse des Python-Quellcodes und Kenntnisse über Roboterkinematik/inverse Kinematik. Es ist sowohl lehrreich als auch unterhaltsam und ermöglicht es Ihnen, spielerisch zu lernen. Lernen Sie in der High School wertvolles Wissen über Robotik.
Das Produkt ist in der Python-Sprache programmiert und bietet einen sekundären Entwicklungsquellcode (SDK) sowie unterstützende Kursmaterialien, die den Einstieg in die praktische Schulung und Entwicklung erleichtern.
Schlüsseltechnologien: Python/Hexapod-Bionik/Kinematik-Algorithmus/Inverse-Kinematik-Algorithmus/Jetson Nano
| Parametername | Parameterdetails |
| Größe | 300X300X250 mm (Standby-Standposition) |
| Gewicht | 3,2 kg |
| Hauptkontrolle | Jetson Nano Quad-Core ARM A57@1,43 GHz. |
| DDR | 4GB |
| Schnittstelle | 1 x1/2/4 PCIE, 1x USB 3.0, 3xUSB 2.0 |
| Hauptkontrollsystem | Ubuntu |
| Versorgungsspannung | DC 8V |
| Arbeitsstrom | 9A |
| Maximale Geschwindigkeit | 25 cm/s |
| Batteriekapazität | 4000 mAh |
| Batterielebensdauer | 1 H |
| Servomodell | XR-S270 |
| Freiheitsgrad | 18 DOF + 2 DOF Gimbal |
| Ladezeit | 7-10 Stunden |
| Gangart | Delta-Gang |
| Gangalgorithmus | Inverse Kinematiklösung |
| Kameraauflösung | 720P |
| Kamerapixel | 1 Million |
| Kontrollabstand | 20M |
| Steuerungsmethode WLAN drahtlos | 802.11b/g/n |
| Steuerterminal | Mobiltelefon, PAD, PC-Computer |
| Programmiersprache | Python, C++ |
| Parameter der Kerntreiberplatine | ||||||||||||||||||
|