
Nehmen Sie sich mit in das WIFI-Roboterauto – um die Grundprinzipien zu verstehen
Ein WLAN-Roboterauto ist der Kindheitstraum vieler Menschen. Mein Wunsch nach einem WLAN-Roboterauto kommt von dem ferngesteuerten Videoauto im „Kinderheim“. Damals dachte ich, es wäre großartig, wenn ich eines Tages meinen eigenen WLAN-Roboter bauen könnte Auto. Bis jetzt habe ich meinen Kindheitstraum verwirklicht und viele eigene Roboterautos gebaut.Was aber, wenn die meisten Anfänger, die weder Elektronik noch Computer studiert haben, an WIFI/Bluetooth-gesteuerten intelligenten Roboterautos interessiert sind? Es ist wahr, dass es für eine Person mit dem falschen Beruf eingeteilt ist, aber das macht nichts. Lassen Sie mich Ihnen zunächst etwas über die Prinzipien des Roboterautos erzählen.
Da das Bluetooth Smart Car und das WIFI Smart Roboterauto tatsächlich sehr ähnlich sind, das WIFI-Modul jedoch durch ein Bluetooth-Modul ersetzt wurde, wird auf das Bluetooth Car nicht näher eingegangen.
Unser WIFI-Smart-Roboterauto verwendet einen Router + PC oder ein Mobiltelefon oder eine Web-Steuerungsmethode. Sein Grundprinzip ist in 4 Hauptblöcke unterteilt:
1. Machen Sie aus einem gewöhnlichen WLAN-Router einen kleinen Computer mit Linux, indem Sie ihn in das Open-Source-System OpenWrt integrieren.
Was ist OpenWRT? 1. Über OpenWrt Als Linksys den Quellcode von WRT54G/GS veröffentlichte, gab es im Internet viele verschiedene Versionen der Firmware, um die ursprüngliche Funktionalität zu verbessern. Erstens ist es schwierig, die Stärken der einzelnen Firmware-Versionen zu kombinieren, und zweitens entfernt sich diese Version immer weiter von der offiziellen Linux-Distribution. OpenWrt wählte einen anderen Weg, es fing bei Null an und fügte nach und nach Software hinzu, um es näher an die Linksys-Firmware-Version heranzuführen. Entwicklungsgeschwindigkeit.
Kurz gesagt handelt es sich um eine Nachrüstung des Routing-Quellcodes von Cisco, einem kleinen Linux-System für Router mit bestimmten Chips. Mit diesem System ist unser Routing nicht mehr so einfach wie das Surfen im Internet, wir können verschiedene Programme und Treiber darauf installieren und verwenden Routing als Plattform bietet Benutzern die Möglichkeit, USB-Kameras, Netzwerkkarten, Soundkarten usw. zu laden.
Auf unserem WIFI-Board läuft ein Programm namens mjpg-streamer, das das Video von der USB-Kamera kodiert und über WIFI an den Host-Computer zurücksendet, sodass wir das Video vom Roboterauto sehen können.
Gleichzeitig ist für das Routing normalerweise ein serieller TTL-Port reserviert. Der serielle TTL-Port wird zum Debuggen oder Bürsten verwendet. Wir holen diesen seriellen TTL-Port heraus und können dann über die im Routing installierte Ser2net-Software die Befehle übertragen Vom WIFI-Kanal zum Ausgang der seriellen Schnittstelle. Die Rolle der seriellen Schnittstelle besteht darin, mit dem Mikrocontroller-Chip MCU zu kommunizieren, damit der Mikrocontroller weiß, welche Aktion der Benutzer von ihm verlangt.
Roboterauto-WIFI-Modul (Routing):

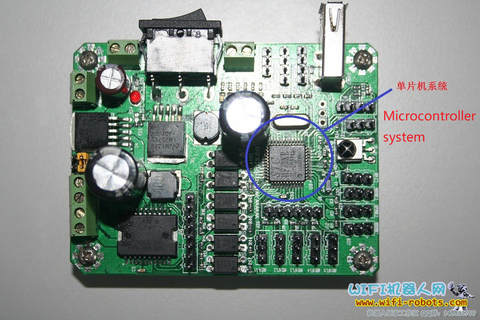
2、Einzelchipsystem und nachgeschalteter Computer
Das Mikrocontrollersystem ist auch das einfachste kleine Computersystem, aber seine Frequenz ist sehr niedrig und nicht für große Datenmengen geeignet. Seine Hauptfunktion besteht darin, den Pegel seiner Ausgangspins (IO-Port) zu steuern, damit der Motortreiberchip den Motor antreibt vorwärts oder rückwärts, um den Roboter vorwärts und rückwärts zu erreichen.
Wir nennen das im Mikrocontrollersystem laufende Programm die untere Einheit. Die Aufgabe dieses Programms besteht darin, Anweisungen von der oberen Einheit zu empfangen, sie zu dekodieren und zu analysieren, um zu verstehen, welche Art von Aktion der Benutzer sendet, und dann die dafür vorgesehenen Pins des Mikrocontroller-Chips zu übertragen Für die Zuweisung auf hoher und niedriger Ebene ist die obere Sendeeinheit dieser Anweisung natürlich das WIFI-Modul, bei dem es sich um das Routing handelt, und die obere Ebene ist dann der PC / das Mobiltelefon und andere Steuerterminals, bei denen es sich um die obere Einheit handelt.
Dies ist das erste Mal, dass ich einen PC oder Mikrocontroller mit einem seriellen TTL-Anschluss gesehen habe, und ich habe noch nie einen PC oder Mikrocontroller mit einem seriellen TTL-Anschluss gesehen.
Zusätzlich zur seriellen TTL-Schnittstelle gibt es eine serielle Schnittstelle namens RS232-Ebene, die auch als 9-polige serielle Schnittstelle bezeichnet wird. Dies ist die serielle Schnittstelle hinter einem gewöhnlichen Desktop-Computer. Die Ebene dieser seriellen Schnittstelle ist nicht TTL Beim Debuggen können diese serielle Schnittstelle und unsere verschiedenen Module nicht direkt für die Kommunikation verwendet werden. Wir müssen eine 232-zu-TTL-Ebene-Karte kaufen.
Roboterauto-Mikrocontroller-Systeme (MCU):
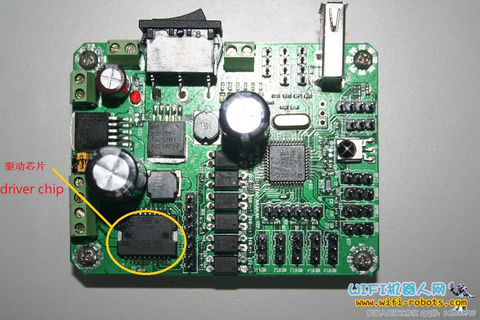
3、Motorantriebsschaltung
Wie ich oben sagte, kann der Mikrocontroller die vom oberen Computer gesendeten Anweisungen analysieren, indem er die Anweisungen beurteilt, und dann einen Pin-Pegel nach oben oder unten ziehen, aber der Pin-Ausgangsstrom des Mikrocontrollers ist sehr klein, Sie können ihn leicht machen LED-Leuchten, aber es ist unmöglich, unseren großen Körper anzusteuern. Daher benötigen Sie einen Treiberchip, um den Motorbetrieb zu steuern, dh den Mikrocontroller mit dem Pin-Pegel, um dem Treibermodul mitzuteilen, z. B. dem Pin P10-P13 des Mikrocontrollers Ist 1010, gibt das Treibermodul zwei Vorwärtsspannungen aus, das Auto fährt vorwärts, wenn es 0101 ist, fährt das Auto rückwärts.
Antriebsschaltkreismodul für Roboterautos:
4、Uploader
Der obere Computer ist der Teil, der die Befehle sendet. Wir senden die Befehle über den oberen Computer an das WLAN-Modul/den Router. Anschließend werden die Befehle durch die Konvertierung des Routers an den Mikrocontroller weitergeleitet, sodass der Roboter gleichzeitig unsere Befehle ausführt Sobald der obere Computer eine Videoanforderung an den Router sendet, sendet der Videoprozessor auf der Routing-Seite das erfasste USB-Kameravideo zurück an den oberen Computer, der obere Computer dekodiert es und zeigt es an.
Der obere Computer ist tatsächlich so geschrieben, dass er Daten über eine Socket-Verbindung über TCP/UDP und andere Kommunikationsmethoden an die Routing-Seite sendet, wobei sich unser oberer Computer im Client-Modus und die Routing-Seite im Server-Modus befindet, was den Vorteil hat, dass dies nicht der Fall ist Es ist kein Weiterleitungsvorgang erforderlich, und wir können uns direkt mit dem WIFI-Smart-Trolley-Roboter verbinden, um ihn zu manipulieren.
Okay, um es zusammenzufassen: Das gesamte intelligente Roboterauto funktioniert wie folgt:

Schließlich finden Sie als Referenz bitte die Website www.xiaorgeek.com des Roboterautos