
Guide
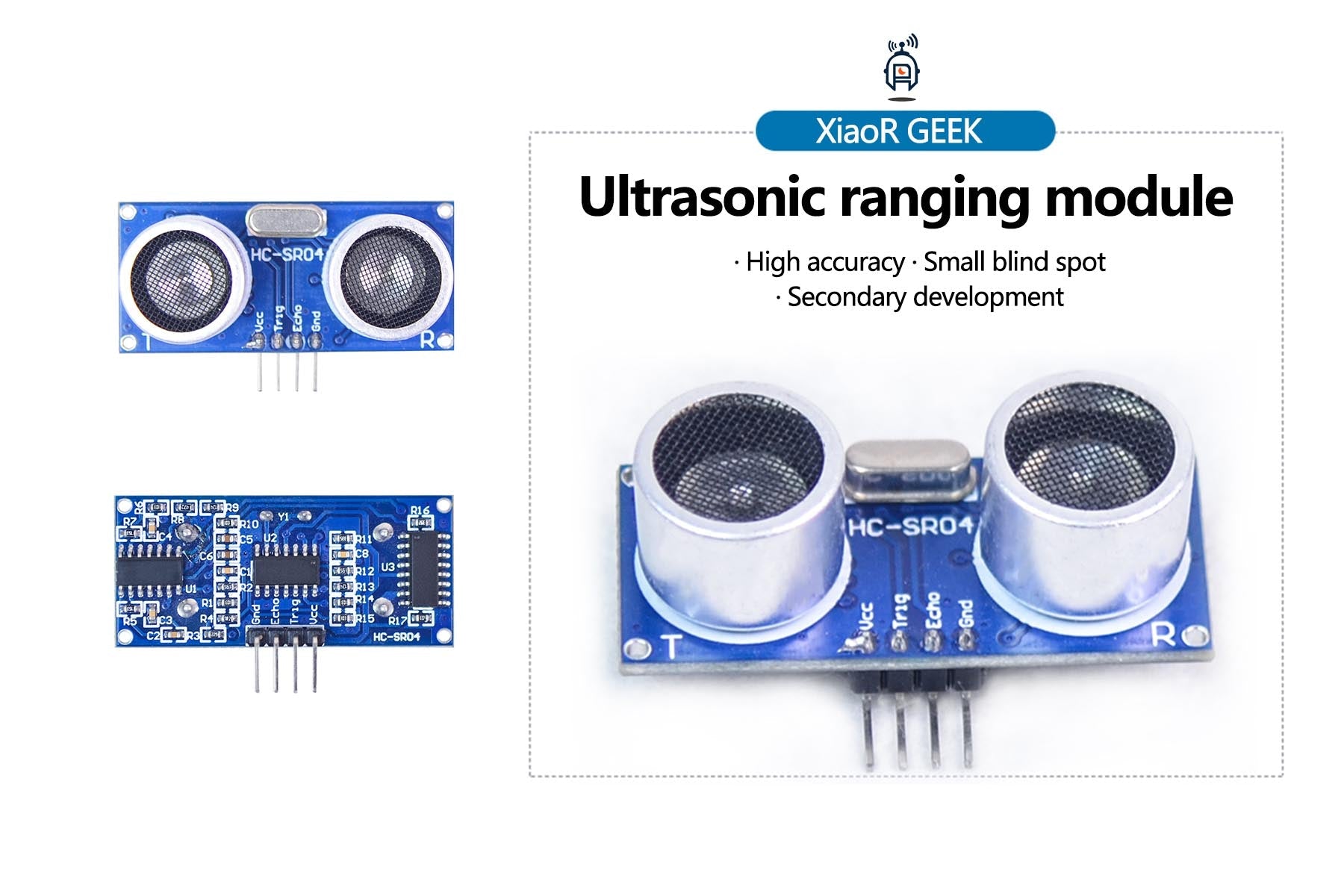

Why Wuli Bot Robot Car Belongs in Your Store (Arduino UNO R3, Scratch and Arduino, Camera, Ultrasonic, IR, and More)
What makes Wuli Bot a standout product for us? As a retailer focused on classrooms, camps, and ambitious hobbyists, we chose this kit because it de...

Unlock Your Coding Potential with the Ultimate TH WiFi Smart Robot Car!
Build, Code, and Explore: Meet Your New Favorite Robot!
Are you ready to dive into the exciting world of robotics and programming? Looking for a ha...
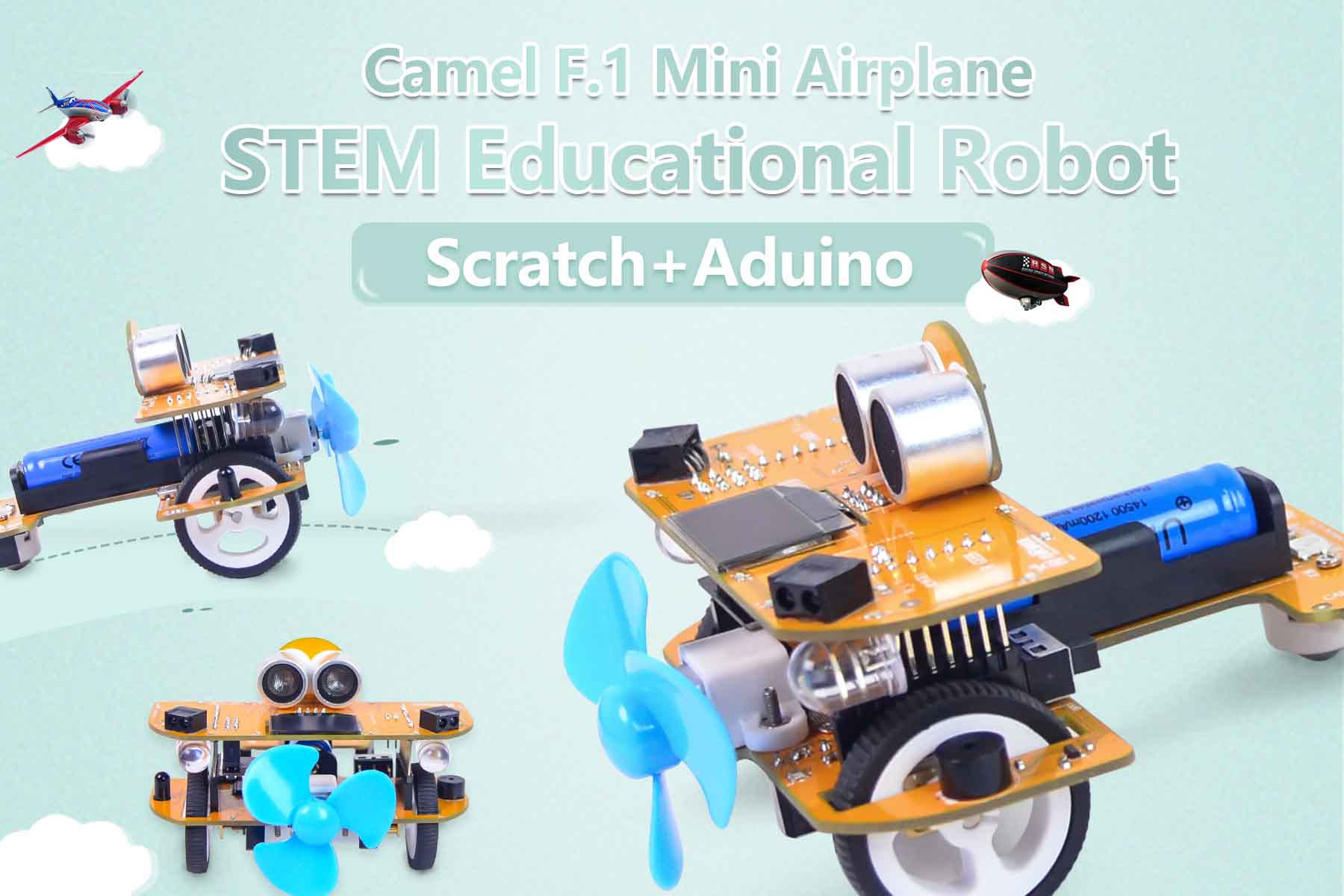
Unlock the Future of STEAM Learning with Camelf1 Mini Airplane K12: A Robot That Sparks Curiosity and Creativity
Transform playtime into a STEM adventure!
In today’s tech-driven world, STEAM (Science, Technology, Engineering, Arts, and Math) education isn’t ju...

Unleash the Future of Robotics with the Phage ROS Hexapod: Your AI-Powered, Bio-Inspired Companion!
Are you fascinated by the cutting edge of robotics? Do you dream of building, programming, and controlling your own advanced, intelligent machine? ...

Unleash the Future of AI Robotics with XiaoR GEEK’s Donkey Car: Your Gateway to Autonomous Innovation
Are you ready to dive into the world of AI-powered robotics? Meet the XiaoR GEEK Raspberry Pi AI Self-Driving Robot Car—a cutting-edge, open-source...
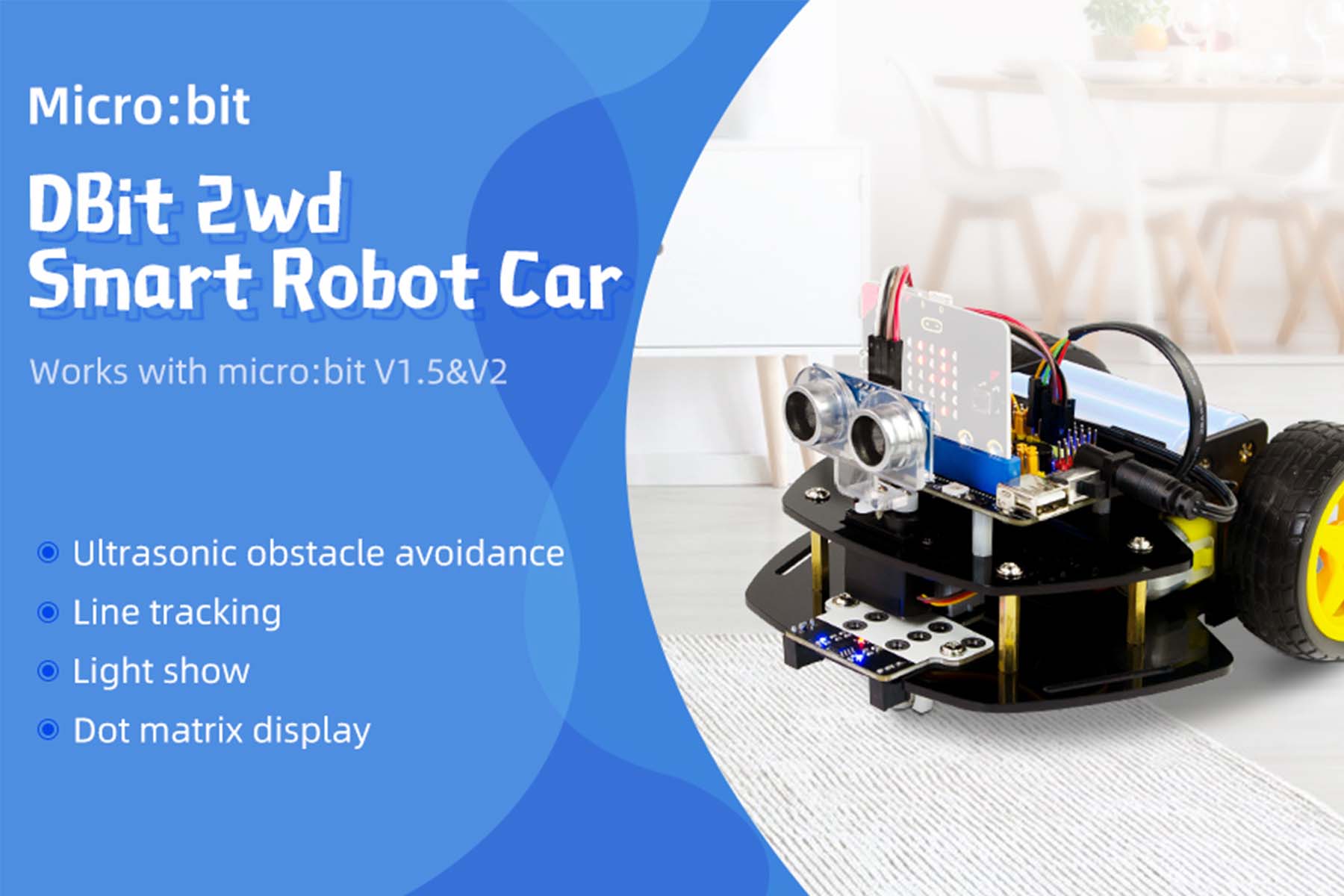
Meet DBit Robot Car: The Ultimate Microbit-Powered STEM Companion for Young Innovators
Hey Makers and Future Innovators!
Are you ready to inject some serious fun and learning into your life? We’re thrilled to introduce the DBit Robot ...

🚗🔧 Transform Your DIY Projects with Our Durable Robot Crawler Tracks! 🔧🤖
Are you dreaming of building a robot that can navigate challenging landscapes, from rocky paths to sandy deserts? Or perhaps you’re looking to add ...
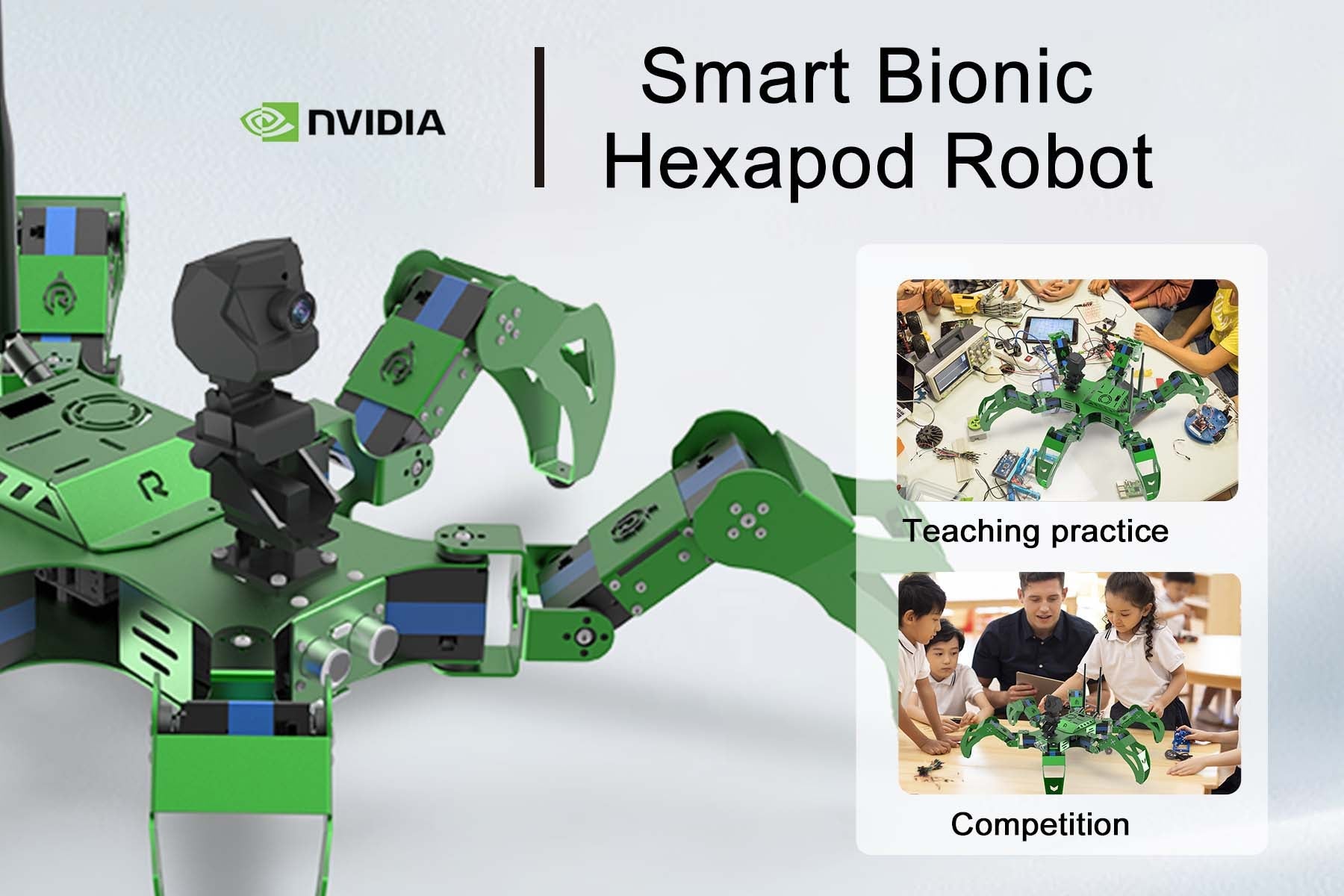
Unleash the Power of Innovation with the Xiaor Geek Jetson Nano Smart Bionic Programmable Hexapod Robot
Are you ready to step into the world of cutting-edge robotics? The XiaoR Geek Smart Bionic Hexapod Robot is not just a toy—it’s a fully programmabl...

Build Smarter Robots: How XR25-370 Motors Are Powering the Next Generation of Robotics
The robotics industry is booming, with applications ranging from smart home assistants to industrial automation and educational STEM kits. At the h...

Discover the Xiaor Geek STM32 Self - Balancing Robot Car
Title: Discover the Xiaor Geek STM32 Self - Balancing Robot Car
In the ever - evolving world of robotics, the Xiaor Geek STM32 Self - Balancing Rob...

Empowering Innovation: Your Guide to XiaoRGEEK Robotics and AI
In a world increasingly shaped by technological advancements, the ability to understand, build, and innovate with robotics and Artificial Intellige...

Unleash Your Inner Innovator with the DS-X Smart Robot Car!
Are you fascinated by the power of Artificial Intelligence and the endless possibilities of the Internet of Things? Do you dream of building your o...