
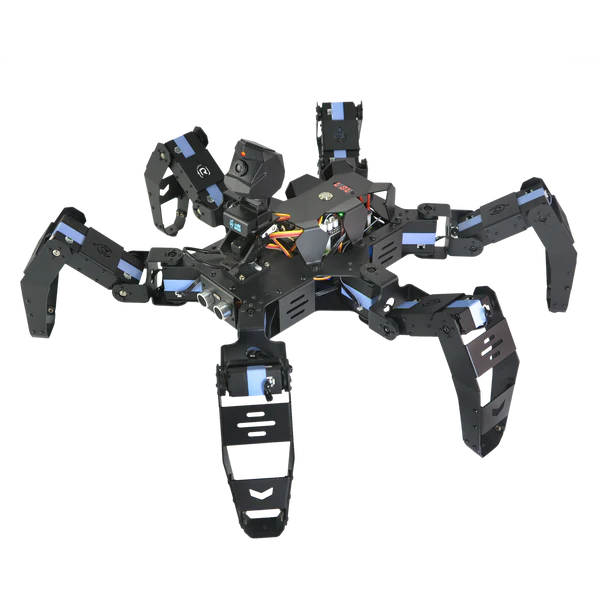
The XiaoR Hexapod R1 Robot is a Hexapod bionic robot based on Raspberry Pi. Through the inverse kinematic algorithm, it can vividly imitate the movement gait of hexapod creatures in nature, which is very interesting. The product is remotely controlled by WiFi and can be controlled with APP, which can be installed on Android phones or tablet devices. You can install the APP on Android mobile phones and tablet devices for control. This product has the function of video image transmission, which can transmit the video images collected by the robot eyes (camera) to the control terminal for display in real time.
The robot can simulate the front, back, left, right, rotation, translation, dance, climbing and other movements of six-leg creatures, and is very suitable for science museums, campus science and technology festivals, science exhibitions and performances, and robot racing competitions and robotics skills competitions andthe other events.
The robot has an AI camera, through which it can realize visual line inspection, face recognition, facial recognition, Color recognition and other cool artificial intelligence gameplay.
This product also provides secondary development SDK code, open communication protocol for users to call, secondary development uses Python, a widely popular programming language among makers, you only need to simply learn the basic programming syntax of Python, you can easy to start to program the secondary development of this robot action, and it can be used as an artificial
intelligence laboratory training platform for electronic information, artificial intelligence, Internet of Things, computer, automation and other colleges and universities.
The robot can simulate the front, back, left, right, rotation, translation, dance, climbing and other movements of six-leg creatures, and is very suitable for science museums, campus science and technology festivals, science exhibitions and performances, and robot racing competitions and robotics skills competitions andthe other events.
The robot has an AI camera, through which it can realize visual line inspection, face recognition, facial recognition, Color recognition and other cool artificial intelligence gameplay.
This product also provides secondary development SDK code, open communication protocol for users to call, secondary development uses Python, a widely popular programming language among makers, you only need to simply learn the basic programming syntax of Python, you can easy to start to program the secondary development of this robot action, and it can be used as an artificial
intelligence laboratory training platform for electronic information, artificial intelligence, Internet of Things, computer, automation and other colleges and universities.
1. Get to know the Robot Parts

| Part Name | Function description |
| Servo | It is used to control the rotation angle of each joint of the robot. There are 3 servos for each leg and 18 servos for the whole body. |
| Limbs-leg | A set of limbs consists of 3 joints, some joints close to the body are used for swinging back and forth, and other joints are used for swinging up and down. |
| Body | Built-in battery, control system, drive system and other circuits. |
| Camera | Hexapod R1 robot’s eyes and a USB camera are used to capture real-time video images and transmit them to the control terminal. |
| 2DOF PTZ | Used to control and drive the camera to rotate up, down, left and right. |
| Voltage display | The LED voltage display is used to display the voltage and indicate the remaining power. If the power is insufficient, it needs to be charged in time. |
| Switch | Used to power on and off the robot. |
| Charging port | For battery charging, please use the special charger provided with the product, otherwise the battery may be damaged. |
| Battery | It is used to power the robot system. Do not replace other batteries without permission, otherwise it may cause circuit damage. |
| Charger | The charger provided with the robot has an overcharge protection function, please do not replace other chargers at will. |
| Manual | It is used to guide users to quickly get started with robot control. |
2. Robot parameters
| Parameter name | Parameter details | Parameter name | Parameter details |
| Size | 350X350X250mm | Weight | 2.5kg |
| Main control | Raspberry Pi 4B | RAM | 4GB/8GB |
| Interface | UART/SPI/I2C/PWM/GPIO | Working current | 9A |
| Supply voltage | DC 7.4-8V | Control system | Raspbian |
| Fastest speed | 20cm/sec | Battery capacity | 4000mAh |
| Battery life | 1 hour | Servo model | XR-S270 |
| Degrees of freedom | 18 DOF | Charging time | 7-10 hour |
| Gait Type | Three-angle gait | Gait algorithm | Inverse kinematics solution |
| Camera resolution | 1080P | Pixel camera | Two million |
| Control distance | 20M | Control method | WiFi wireless 802.11b/g/n |
| Control terminal | Android APP, PC, handle | Program language | Python/C++ |
3. Main control board interface
