

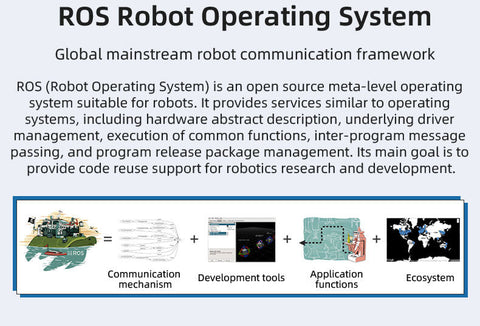
What is ROS2?
ROS2 (Robot Operating System 2) is the successor of ROS. Its working principle is similar to ROS1. It is an operating system widely used in the field of robot research and development. ROS2 was designed to solve some of the problems of ROS1, such as complex setup, instability, and lack of real-time performance. Compared to ROS1, ROS2 has many improvements and optimizations, including better performance, simpler installation and configuration, support for real-time systems, and better community support.
The development history of ROS2 can be traced back to 2010, when ROS1 was first released as an official version, aiming to design a common software architecture for PR2 (personal service robot). With the popularization of ROS1 technology, ROS1 has begun to be widely integrated into the research and development of unmanned systems in various fields, but it has also exposed many problems. In order to meet the needs of robot research and development in the new era, the first alpha version of ROS 2.0 was launched in August 2015. On December 19, 2016, the beta version of ROS 2.0 was officially released. On December 8, 2017, the first official version of ROS 2.0 - Ardent Apalone was released. Since then, ROS2 has entered a stage of rapid development.
ROS2 is a flexible framework that can be used to build various types of robotic applications, including mobile robots, drones, industrial robots, and more. It provides a series of tools and libraries to simplify various tasks in robot development, such as perception, control, navigation and interaction. ROS2 can use tools to embed and work with ROS1 packages. ROS2 is based on the DDS (Data Distribution Service) protocol. It allows efficient communication between different components of the robot and also provides support for repeatability and modular development, allowing robot developers to develop and test robot applications more flexibly and efficiently. The systems supported by ROS2 include Linux, windows, Mac, RTOS, and even bare metal without operating systems such as microcontrollers.
Compared with ROS1, ROS2 has the following advantages:
1. Simple and easy to use: ROS2 simplifies the installation and configuration process, making it easier for developers to start using the robot operating system.
2. Real-time performance: ROS2 supports real-time operating system (RTOS), which can provide better real-time performance while ensuring stability. This is important for robotic applications that require real-time responses.
3. Better community support: ROS2 has wider community support and more developers are using it, which means help and resources can be found more easily.
4. Security: ROS2 is designed and implemented with security in mind, providing some security features such as encrypted communication and authentication.
5. Scalability: The design of ROS2 makes it easy to expand and customize, and new functions and components can be easily added.


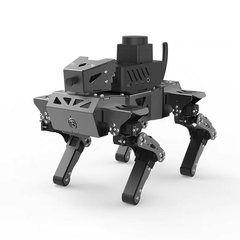
ROS 1 series programmable robot car


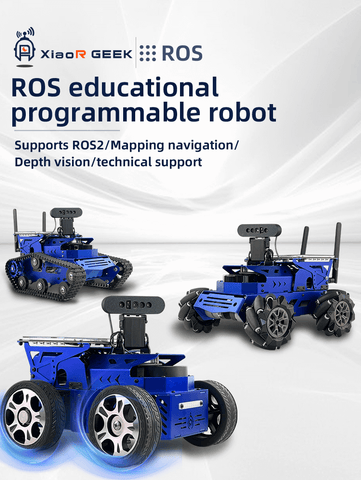
ROS2 series robot car
In summary, ROS2 is a powerful, easy-to-use, safe and scalable robot operating system suitable for various types of robot applications. By learning ROS2, you can better understand how robots work, master advanced robotics technology, and quickly build your own robot applications.